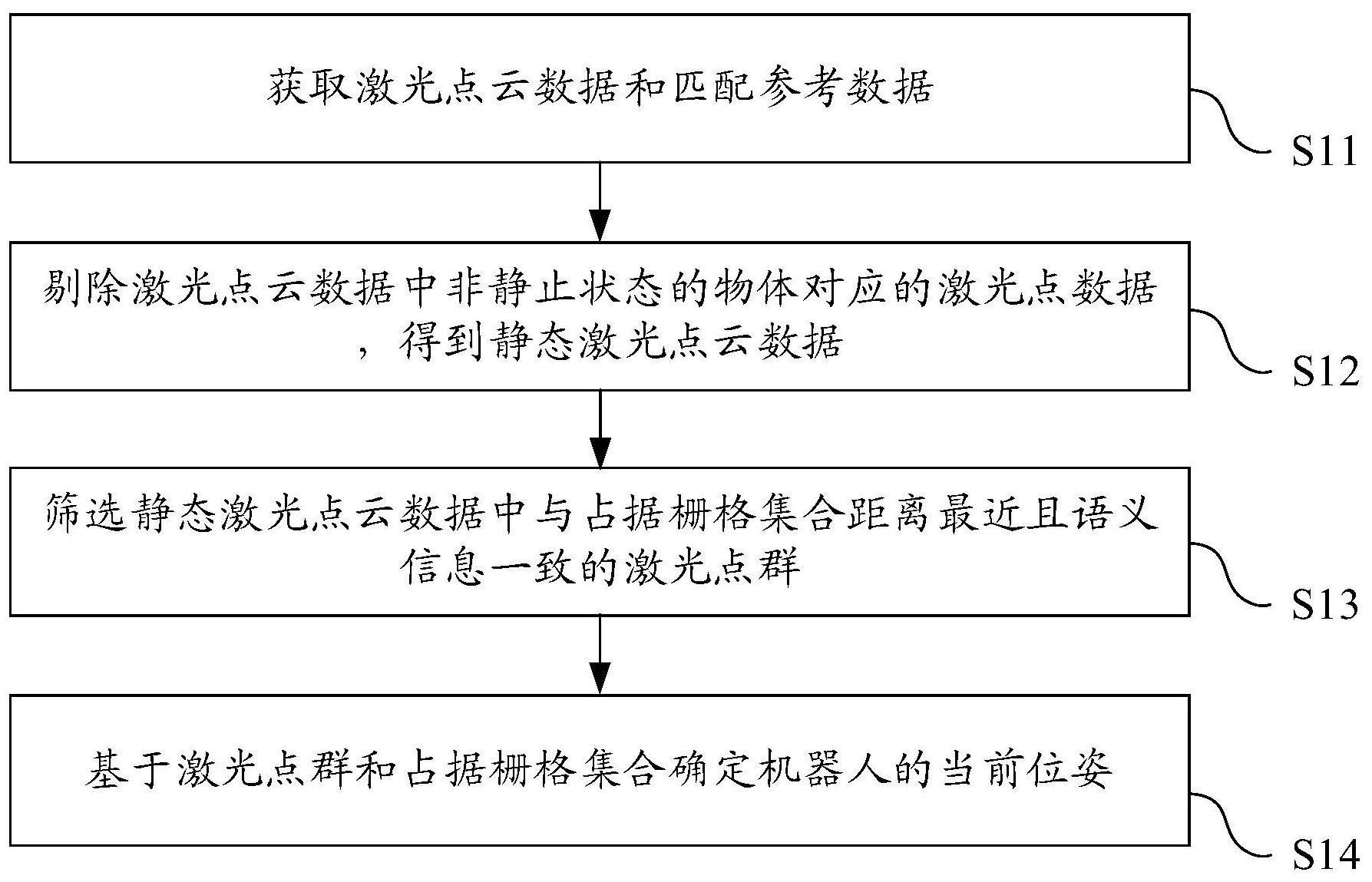
本申请公开了一种机器人的位姿估计方法、机器人和计算机存储介质。方法包括如下步骤:获取激光点云数据和匹配参考数据,匹配参考数据是基于环境信息筛选得到的,匹配参考数据包括占据栅格地图中占据栅格组成的具有语义信息的占据栅格集合,占据栅格集合用于表征处于静止状态的物体;剔除激光点云数据中非静止状态的物体对应的激光点数据,得到静态激光点云数据;筛选静态激光点云数据中与占据栅格集合距离最近且语义信息一致的激光点群;基于激光点群和占据栅格集合确定机器人的当前位姿。通过上述方式,本申请能够提高匹配参考数据和激光点云数据匹配的准确性。