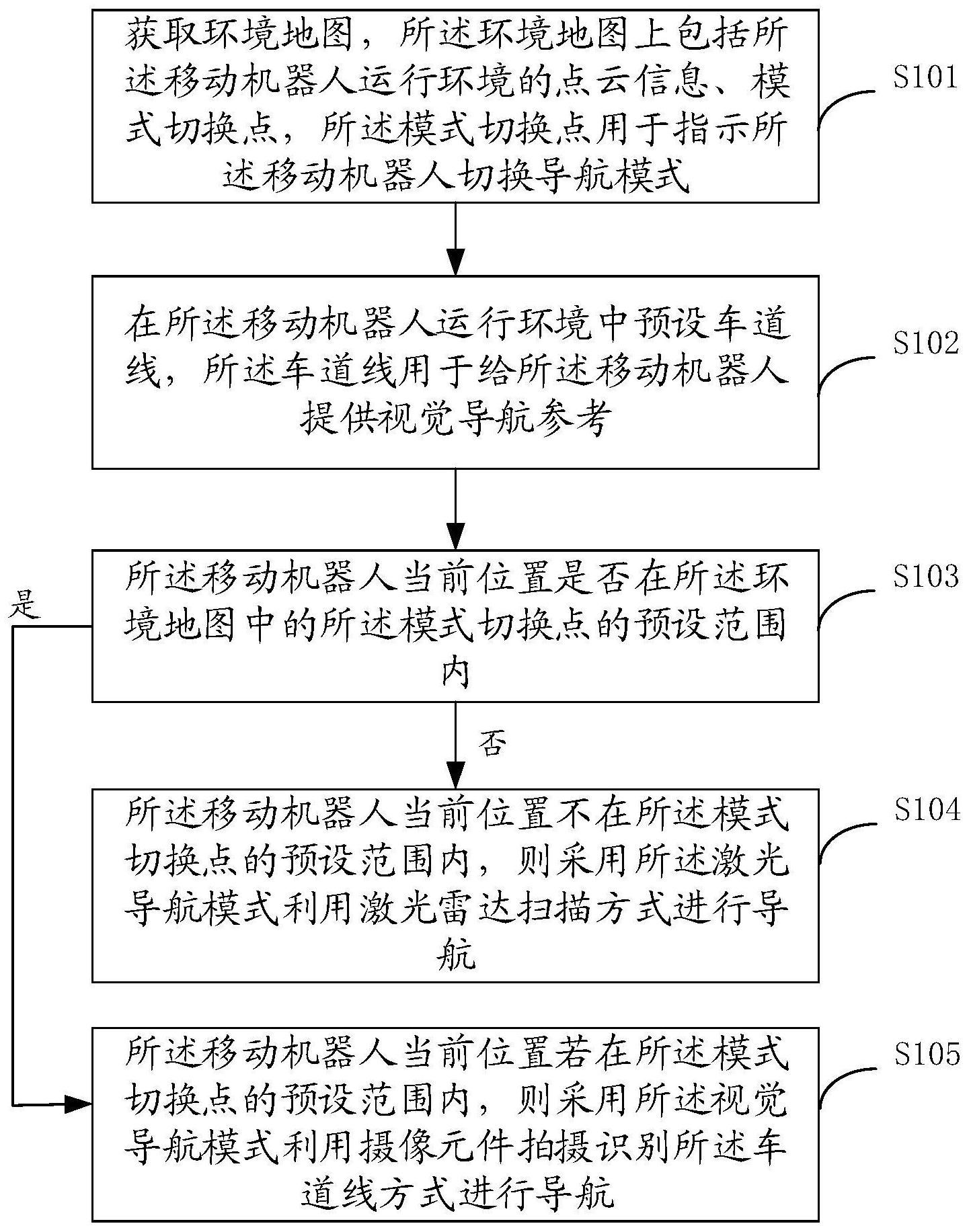
本发明公开了一种移动机器人混合导航方法、设备及存储装置,所述移动机器人混合导航方法包括获取环境地图,在所述移动机器人运行环境中预设车道线,所述移动机器人当前位置是否在所述环境地图中的所述模式切换点的预设范围内;若判断不在所述模式切换点的预设范围内,则采用所述激光导航模式利用激光雷达扫描方式进行导航,若判断在所述模式切换点的预设范围内,则采用所述视觉导航模式利用摄像元件拍摄识别所述车道线方式进行导航。通过上述方式,本发明能够达到适应多种导航环境,特别是在上下坡、长走廊及夜间导航环境下仍能精确导航的目的。