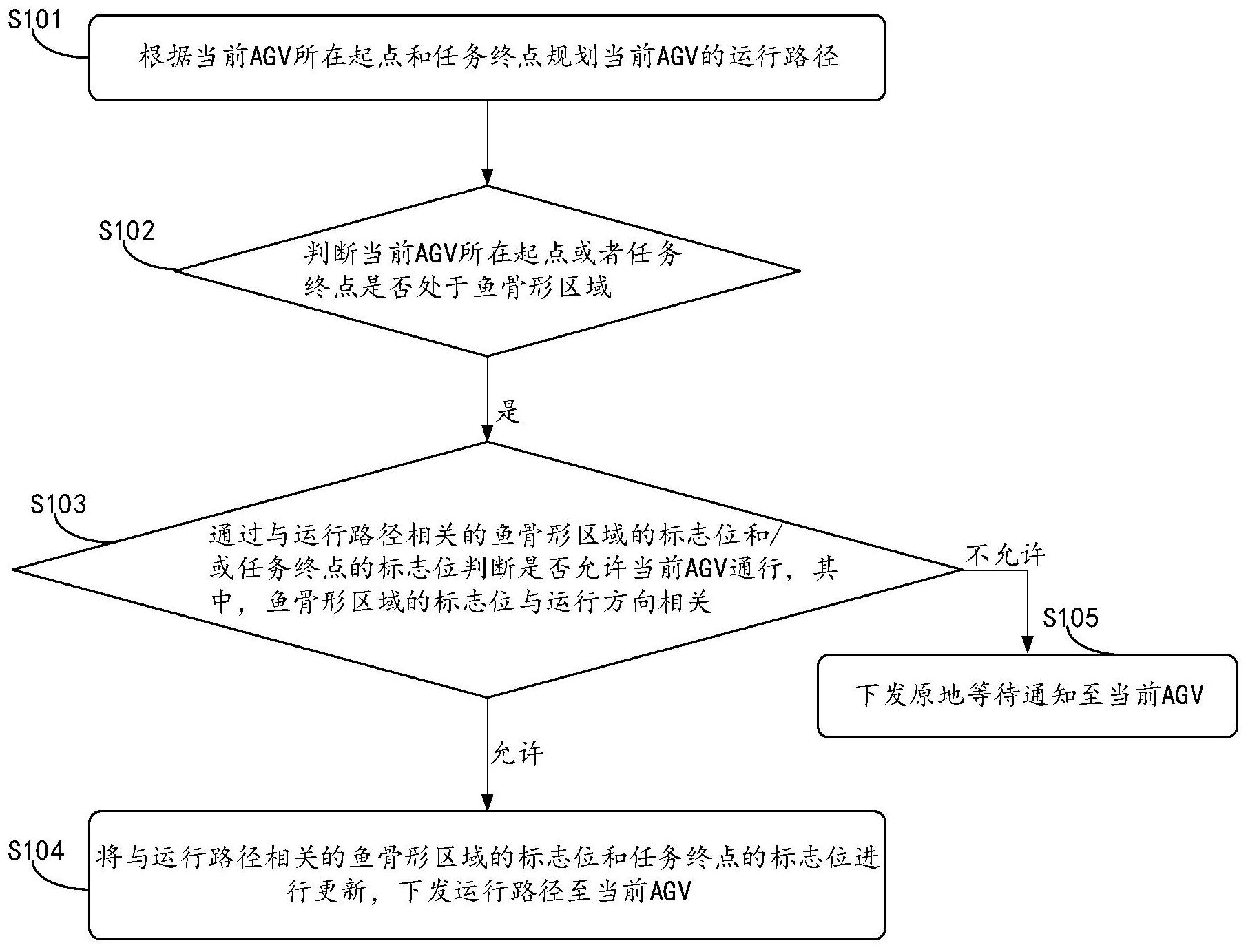
本申请提供了一种针对鱼骨形区域的AGV管制方法、管制装置及存储装置,管制方法包括:根据当前AGV所在起点和任务终点规划当前AGV的运行路径;判断当前AGV所在起点或者任务终点是否处于鱼骨形区域;若是,则通过与运行路径相关的鱼骨形区域的标志位和/或任务终点的标志位判断是否允许当前AGV通行,其中,鱼骨形区域的标志位与运行方向相关;若允许,则将与运行路径相关的鱼骨形区域的标志位和任务终点的标志位进行更新,下发运行路径至当前AGV;否则,下发原地等待通知至当前AGV。通过上述方式,本申请能够在下发运行路径之前判断是否允许当前AGV通行,降低出现相向而行的情况。