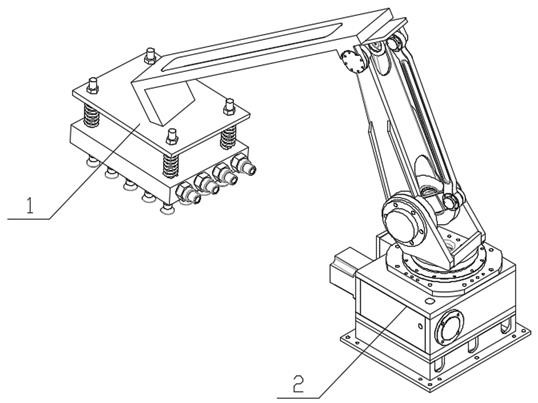
本实用新型公开了一种用于码放围棋棋坯的机械手,包括多轴机械臂和抓手,抓手设置在多轴机械臂上;抓手包括与多轴机械臂连接的连接板,连接板的下部通过多组伸缩机构连接有吸盘组件;吸盘组件包括安装座,安装座的内部沿其长度方向设有多个等间距布置的气流通道,气流通道贯穿安装座的一侧端面,且该侧端口设有抽真空接头,安装座的下部设有与每一个气流通道对应连通的多个真空吸盘。本实用新型可以一次性吸附多枚棋坯完成转运作业,相比传统人工拾捡效率更高;解决了传统单个真空吸盘对应连通一根抽气管导致管路复杂的麻烦,整体简单,后期维修更换方便。