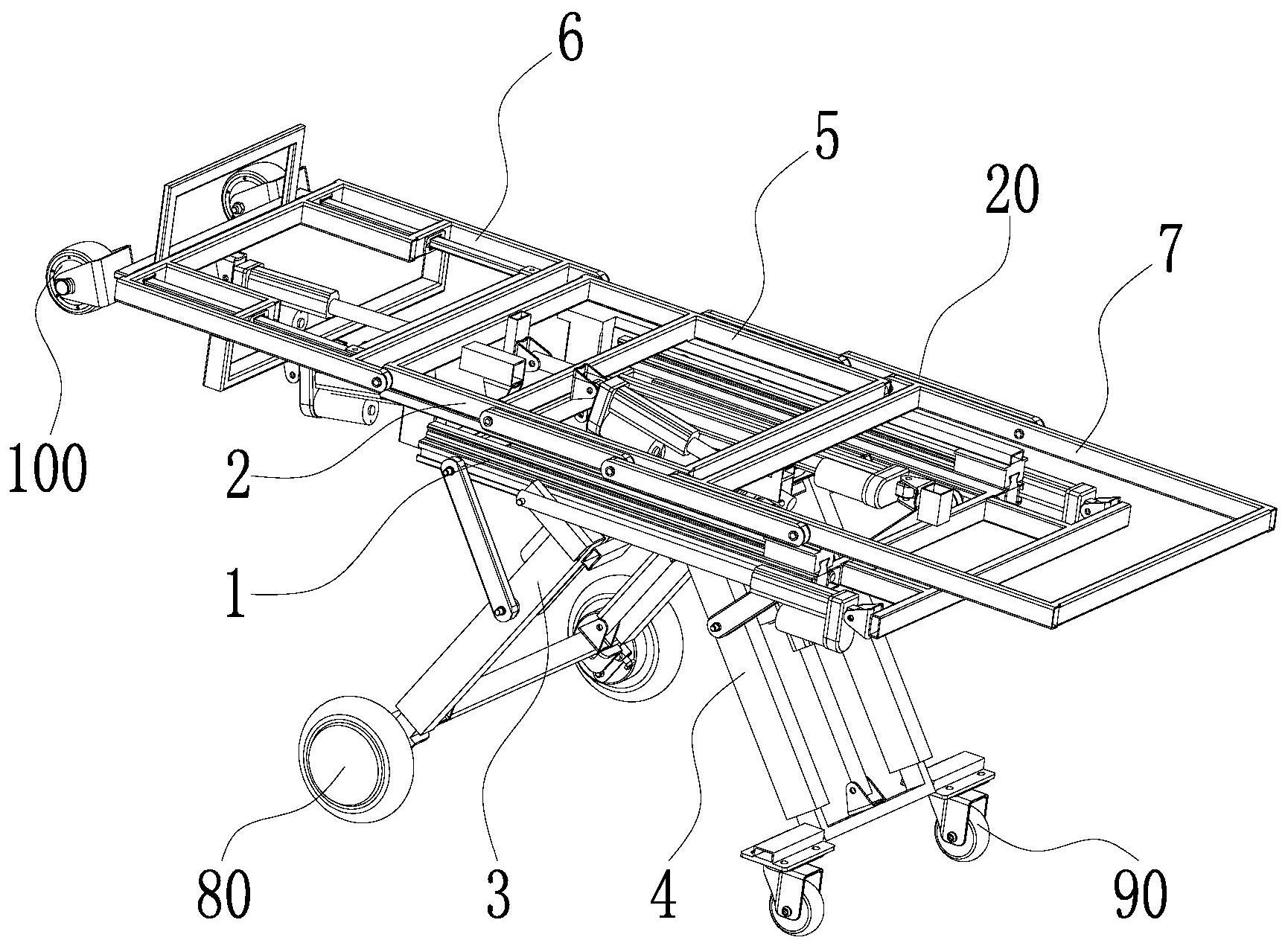
本发明公开了一种载人机器人,包括支撑架、安装于支撑架上的承载架、安装于支撑架底部的第一连杆机构和第二连杆机构;所述第一连杆机构和第二连杆机构分别连接有两第一车轮和两第二车轮;所述承载架包括:安装于所述支撑架上的第一承载部、转动连接于第一承载部前部的第二承载部、以及转动连接于第一承载部后部的第三承载部;所述第一连杆机构连接有可滑动的第一轮架,所述第一连杆机构与第一轮架之间连接有第三电动推杆;所述第二连杆机构连接有可滑动的第二轮架,所述第二连杆机构与第二轮架之间连接有第四电动推杆。本发明具有可上下升降的并可在轮椅模式和担架模式之间转换的优点。