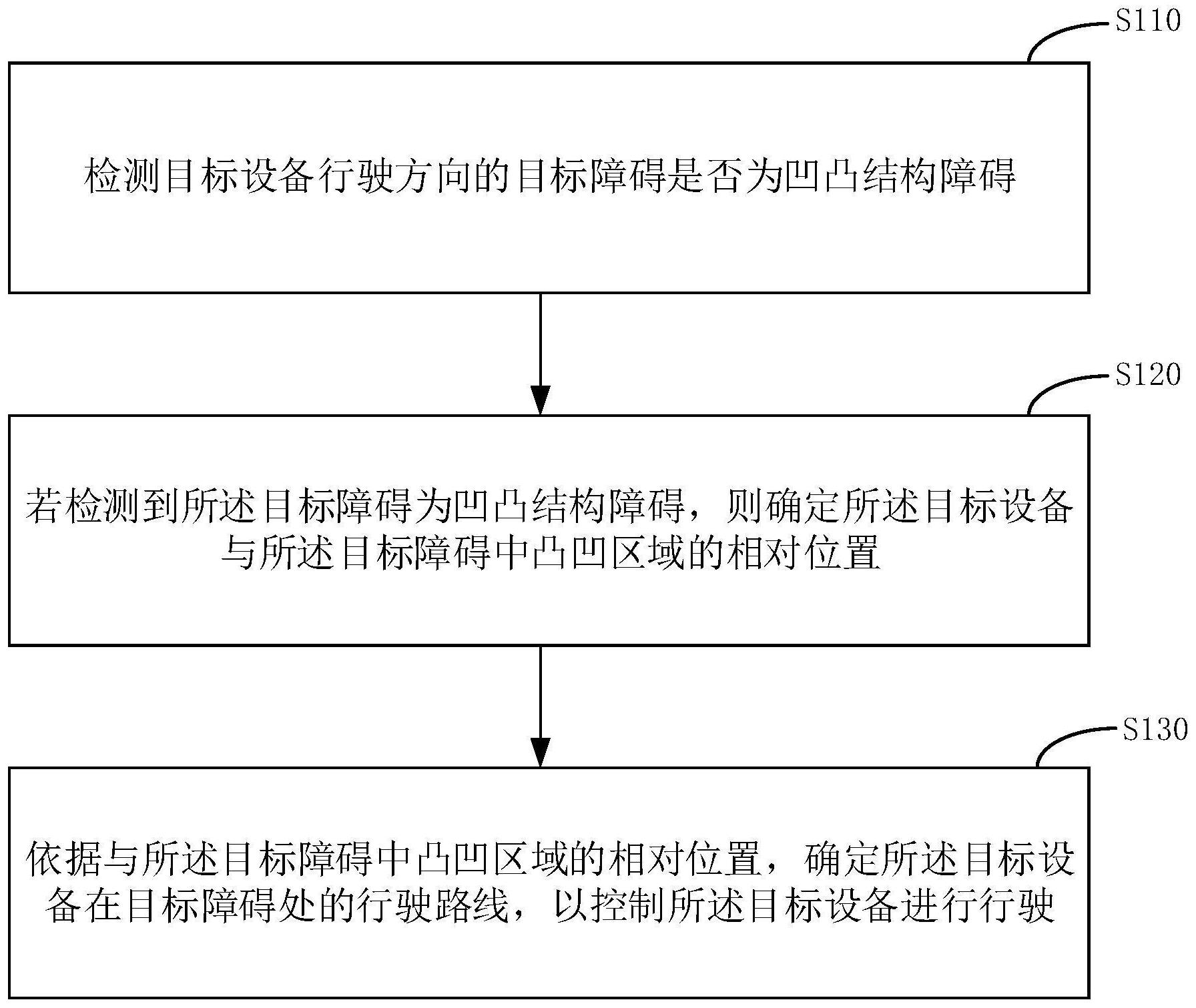
本发明公开了一种行驶控制方法和电子设备。该方法包括:检测目标设备行驶方向的目标障碍是否为凹凸结构障碍;若检测到所述目标障碍为凹凸结构障碍,则确定所述目标设备与所述目标障碍中凸凹区域的相对位置;依据与所述目标障碍中凸凹区域的相对位置,确定所述目标设备在目标障碍处的行驶路线,以控制所述目标设备进行行驶。本申请技术方案通过确定目标设备行驶方向的目标障碍为凹凸结构障碍,同时根据精确确定的目标障碍中凸凹区域的相对位置,获取目标设备在目标障碍处的准确行驶路线,解决了因障碍位置表征不准确导致无法在有限区域进行行驶控制的问题,提高了对目标设备行驶路线规划的准确性。