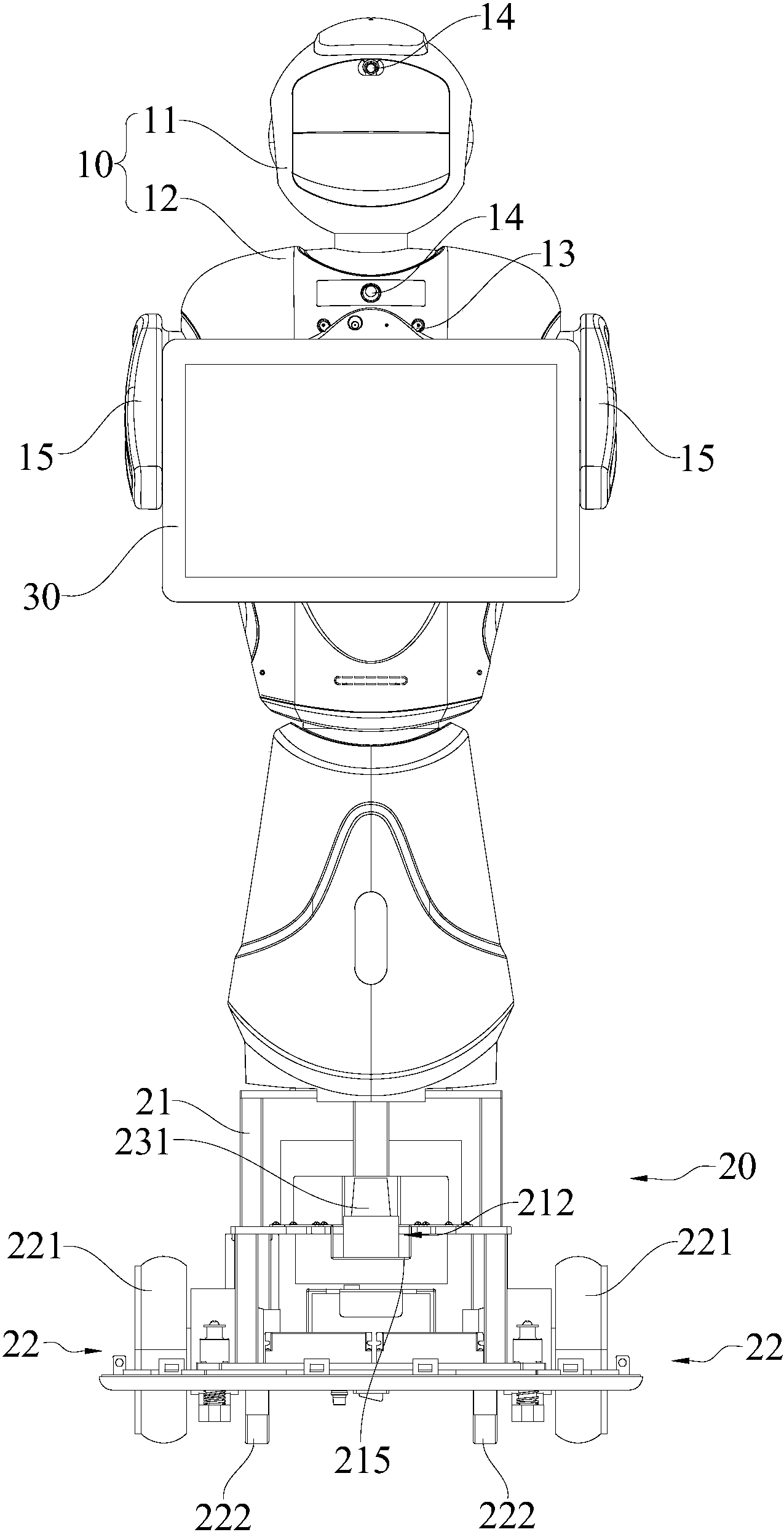
本实用新型属于人工智能设备技术领域,尤其涉及一种智能导览机器人,包括身躯组件和导航驱动装置,导航驱动装置包括箱体、驱动电机、两运动轮组、导航控制模组和导航传感器,身躯组件固定安装于箱体上,驱动电机固定安装于箱体上,两运动轮组分别可转动地安装于箱体的两侧并均与驱动电机的驱动轴传动连接,导航控制模组固定安装于箱体内并与驱动电机电性连接,导航传感器可拆卸地安装于箱体上端面的前端并与导航控制模组电性连接。导航传感器采集其周围环境的各项参数并将其回传给导航控制模组,导航控制模组运算处理后,根据其运算处理结果控制驱动电机运行,驱动电机驱动运动轮组转动。如此便实现了导览机器人不依托特定辅助设备自行行进。