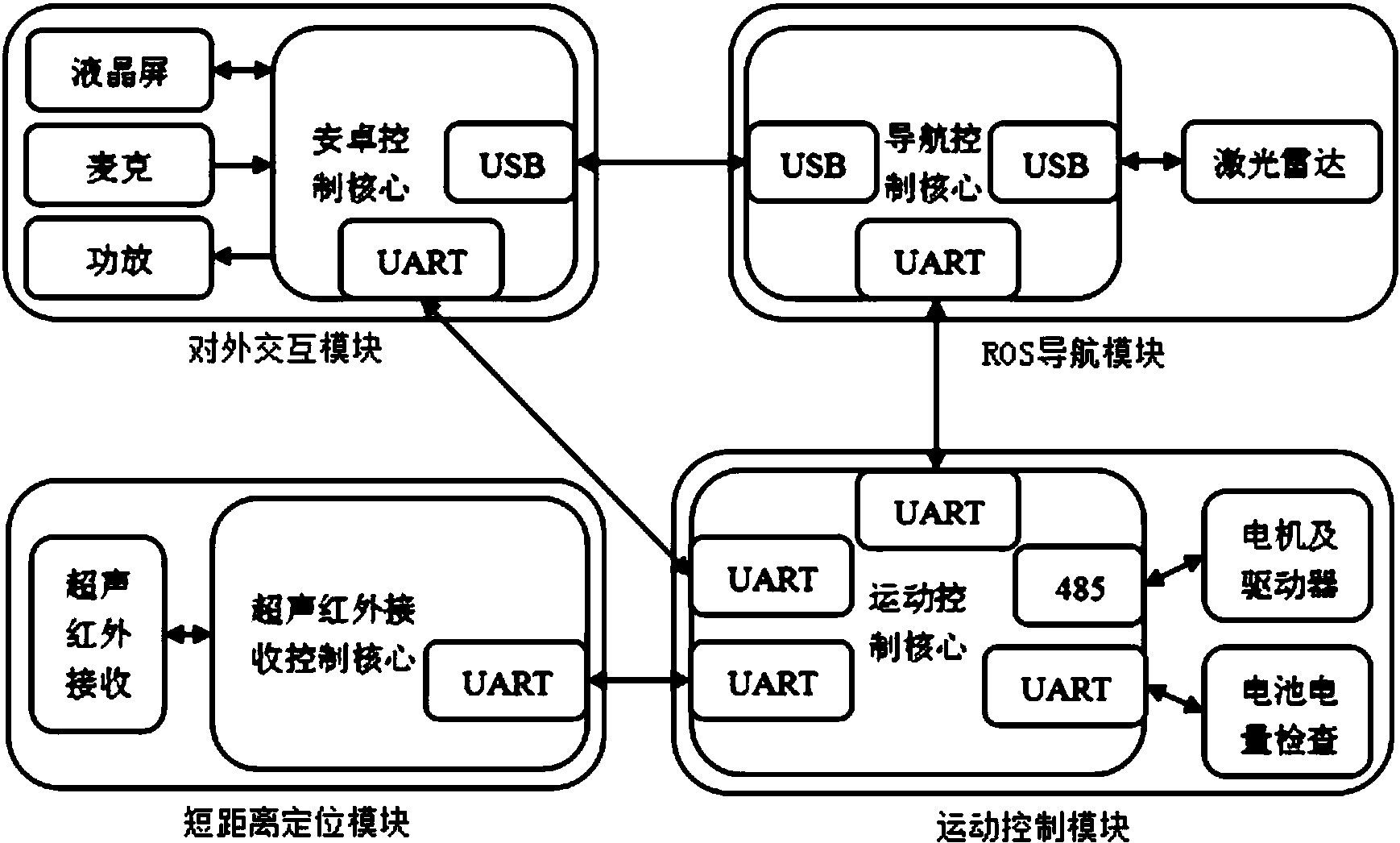
本实用新型公开了一种机器人自主充电系统,属于机器人自主定位和导航技术领域。系统包括对外交互模块、ROS导航模块、运动控制模块和短距离控制模块;对外交互模块为人机交互提供平台,在自主充电过程中接收外界充电命令、控制系统开始进行自主充电并对外界反馈充电结果;ROS导航模块在自主充电过程中将机器人导航到充电桩前1.5m范围内;运动控制模块在自主充电过程中,接收ROS导航模块的控制命令,控制电机做相应的导航动作,当机器人到达充电桩前1.5m左右后,根据短距离定位模块的数据控制机器人完成与充电桩的精确对接;本实用新型在实现自主充电过程中能够自动避开障碍物以及完成对外交互。