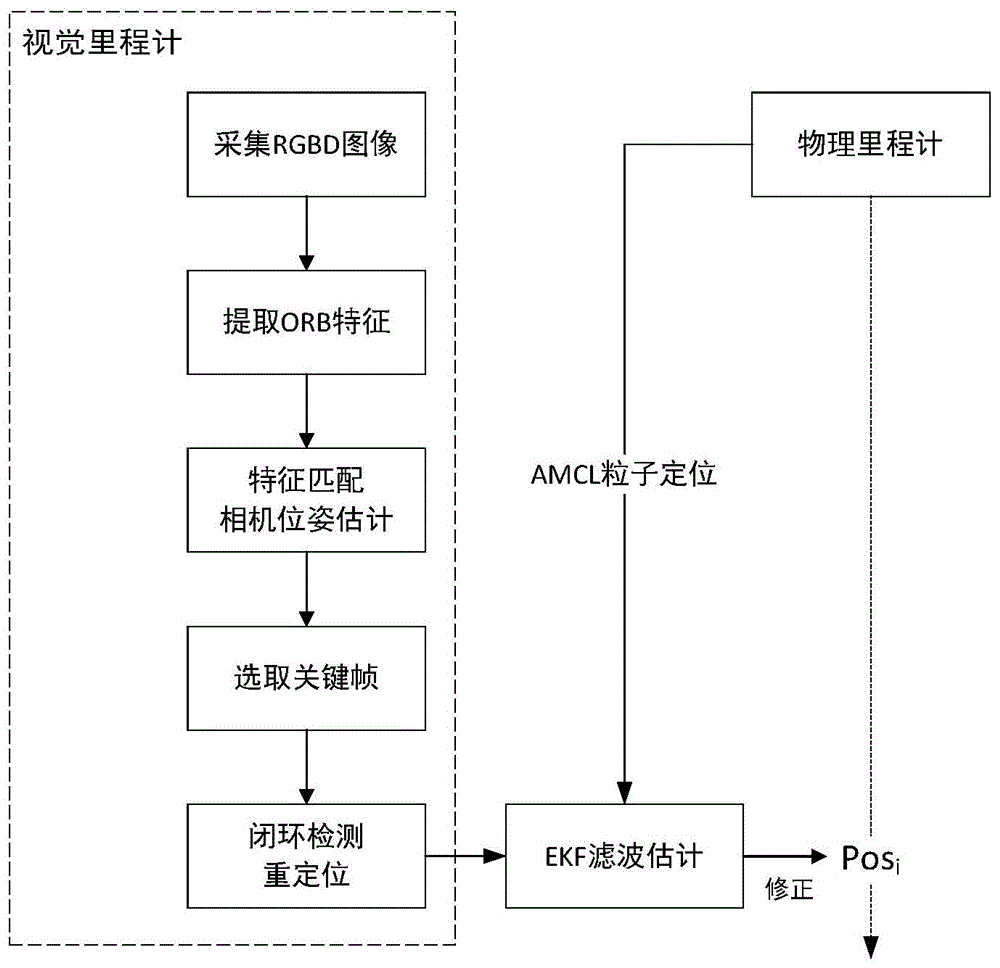
本发明公开了一种融合视觉里程计与物理里程计的室内机器人定位方法,通过采集的图像提取ORB特征进行图像匹配、相机位姿估计、闭环检测精确定位机器人。本发明加入了视觉传感器在已知环境中对机器人进行闭环检测,以此消除基于粒子滤波的物理里程计在全局中的累计误差,把里程计的全局误差变为了阶段性的累加,并在此基础上构建了闭合的地图。本发明融合视觉里程计后有效解决物理里程计误差累计问题,能使机器人在已知环境中进行自定位和精确重定位,且增加的运算量不大,能保证效率和实时性,精度满足室内导航需求,是现阶段解决大环境下机器人定位不准的有效方法。