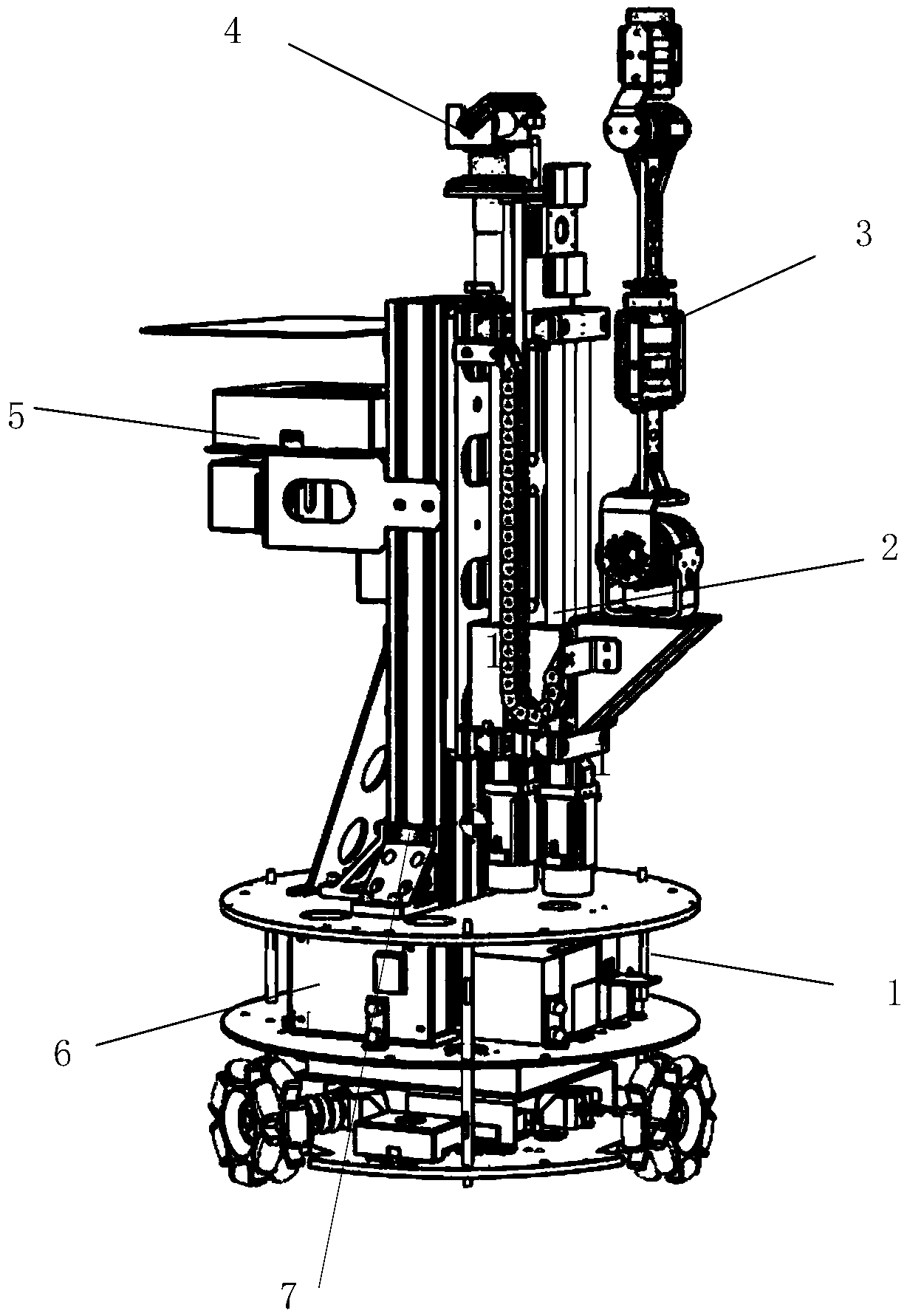
一种手臂可升降式全向移动复合型护理机器人,属于机器人与人工智能领域,该机器人包括全向移动底盘、升降机构、四自由度轻量化机械臂、二自由度云台、控制与显示模块、电气模块和连接与固定装置。本实用新型通过全向移动底盘、升降机构以及四轴机械臂共同组成类斯坦福臂,能够达到六自由度机械臂的工作空间与抓取能力,同时大大地降低了设计的成本;本设计利用伺服电机结合增量式编码器实现闭环控制,控制精度更高,并可以进行反馈调节。本实用新型基于模块化的设计思想,全向移动底盘、升降机构、四自由度轻量化机械臂、二自由度云台、都是独立的模块,方便加工与装配,并可以根据客户不同的要求进行相应配置的选择。