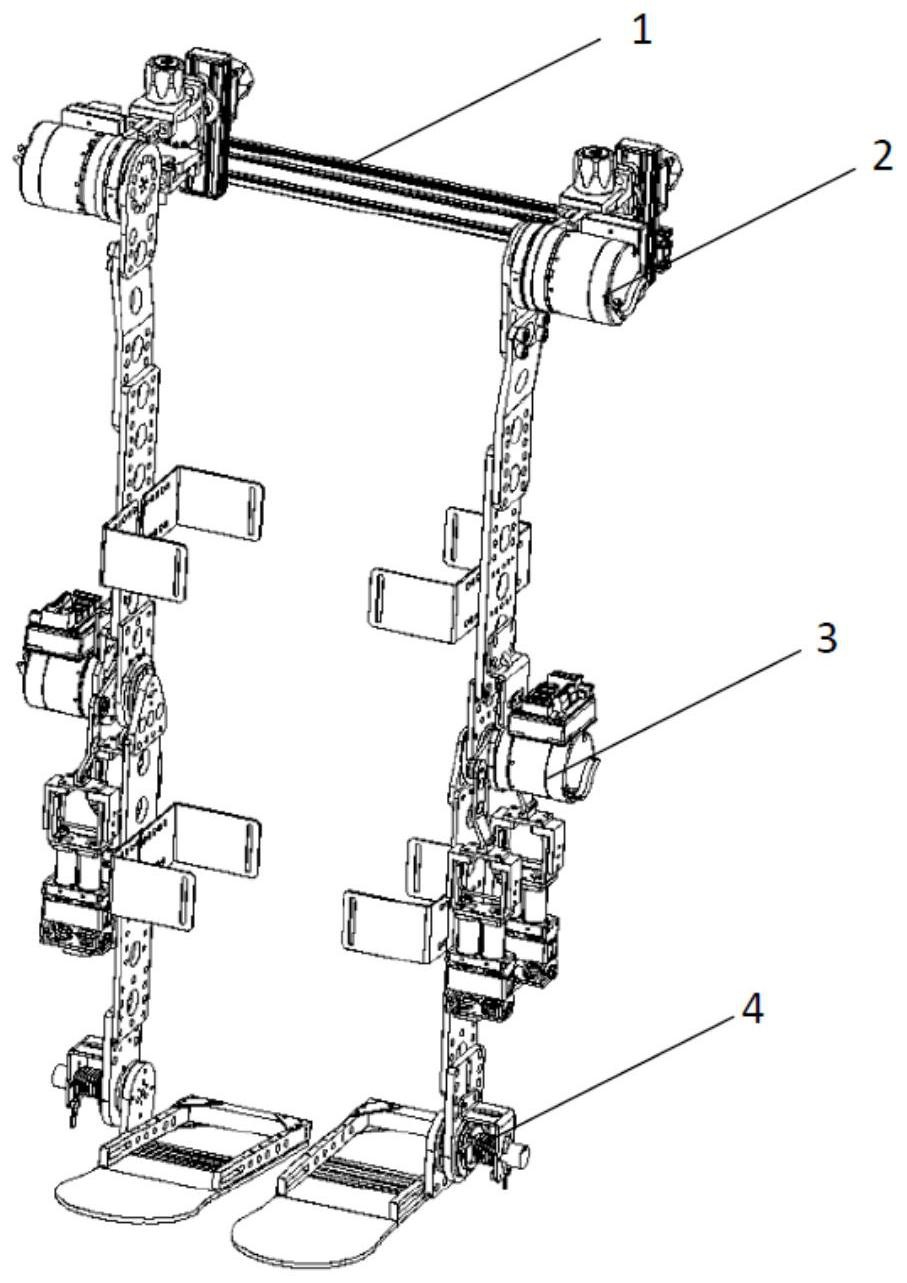
一种基于形状记忆合金的变刚度下肢外骨骼机器人,属于人机融合领域,包括一个背部横梁、两个髋关节模块、两个膝关节模块、两个踝关节模块。背部横梁的端部各设一个髋关节模块,髋关节模块下部通过大腿支件连接膝关节模块,膝关节模块下端通过小腿支件连接踝关节模块。本发明以形状记忆合金作为驱动的新原理,其重量轻,体积小,提升外骨骼整体的机动性能;设计了变刚度外骨骼膝关节,可以有效辅助穿戴者行走,具有变刚度功能,在高机动性需求下,具备更好的驱动效果;材料均采用美铝合金,其质量轻,强度高,可以有效承载外界力,保护穿戴者。