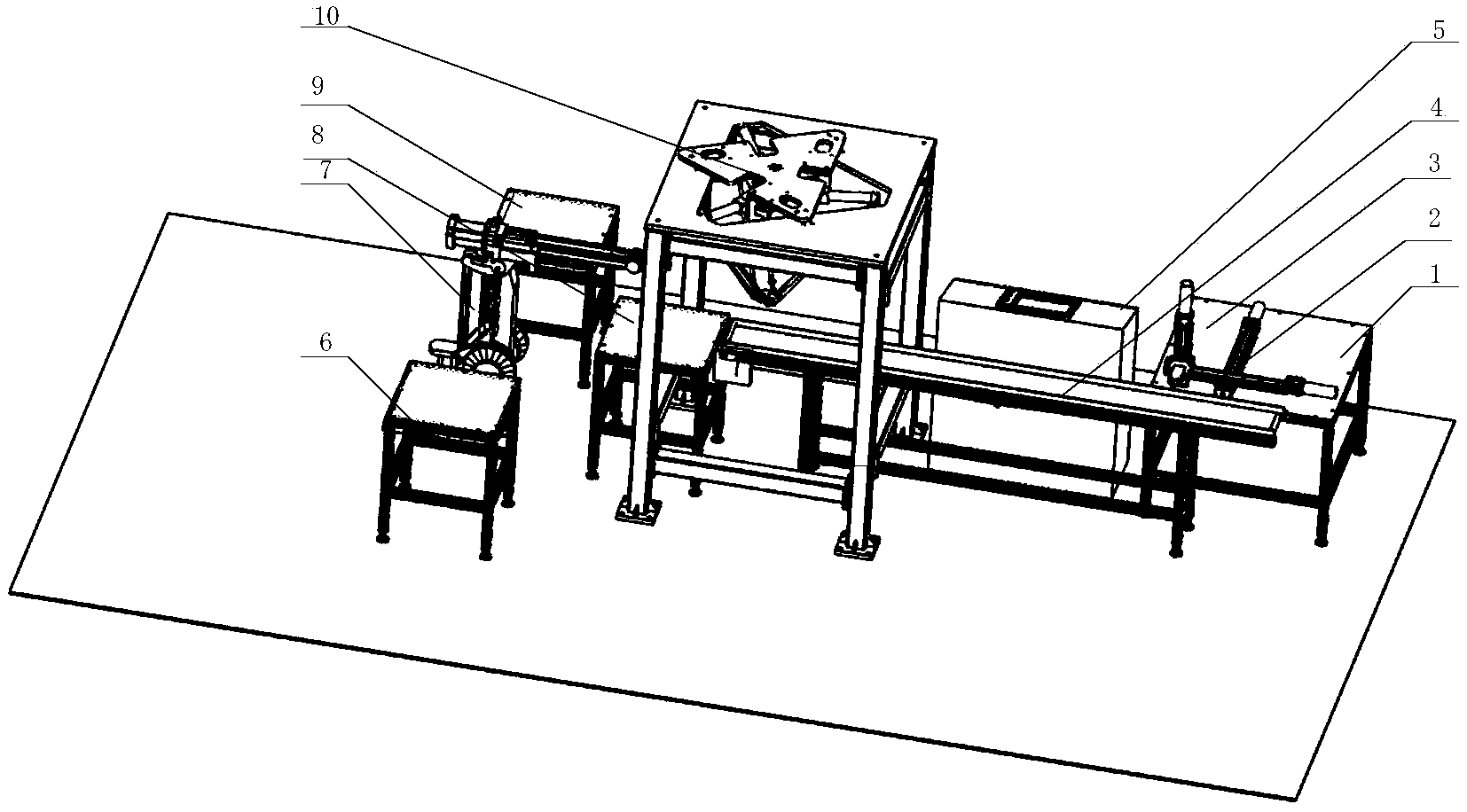
本实用新型属于多机器人协同作业领域,涉及一种异构多机器人协同作业教育实训系统,包括物料上料工作台、直角坐标机器人、包装盒上料工作台、传输带、实验控制系统平台、码垛工作台、多关节工业机器人、装配工作台、上盖放置工作台和并联机器人。传输带为带式传输带,一端为上料端,另一端为下料端;直角坐标机器人位于传输带的上料端,具有三自由度;实验控制系统平台,位于包装盒上料工作台左侧,传输带中部旁侧,设有触摸屏控制显示器,用于控制直角坐标机器人、多关节工业机器人和并联机器人的拾取动作速度和拾取起始点。本实用新型采用多个机器人协同工作,实现了工件的传输、装配和码垛,结构紧凑,适用于自动化加工生产线。