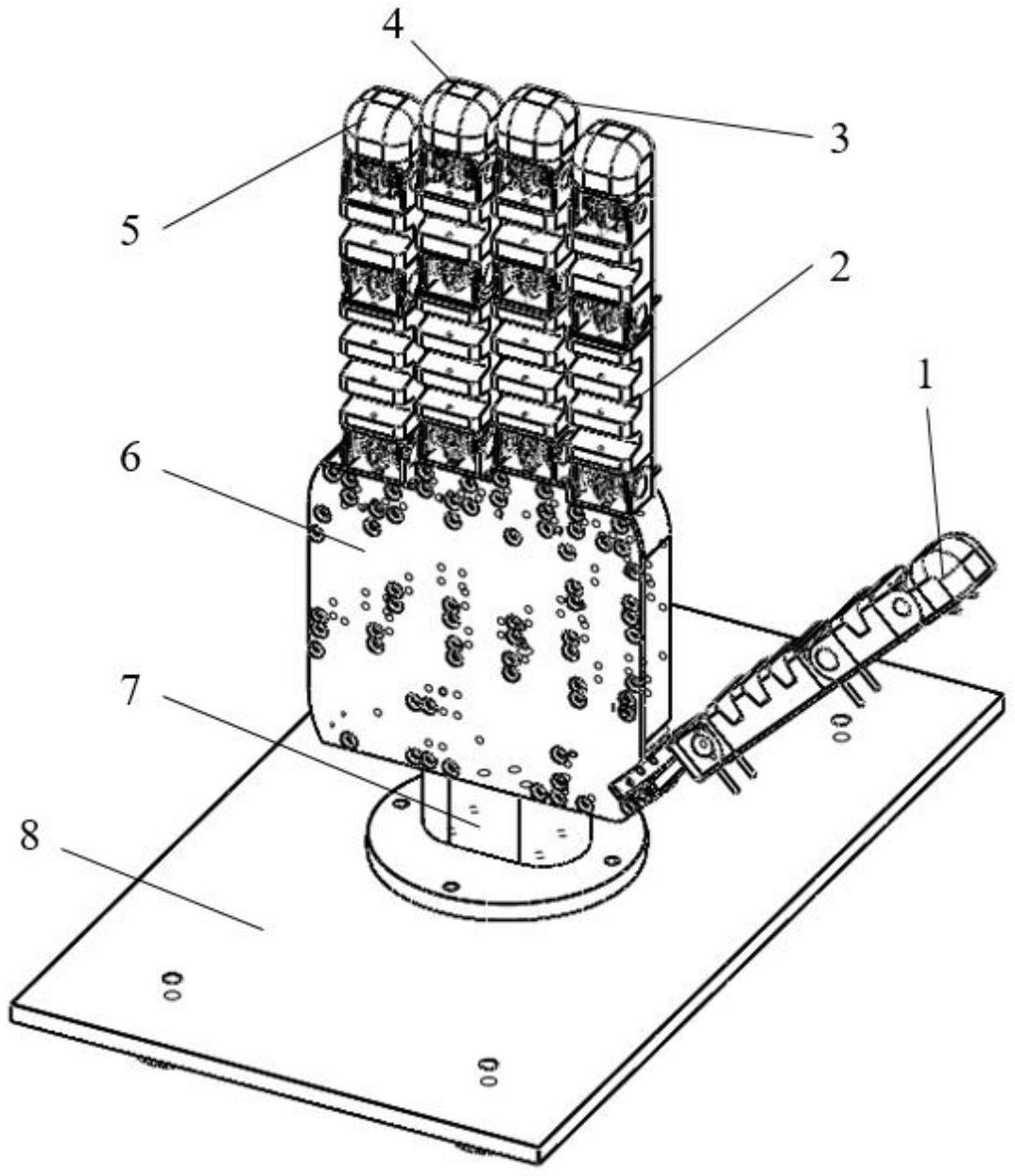
一种刚软耦合欠驱动灵巧手装置,属于机器人领域,包括手指、手掌、手掌连接底座和固定平台,手指包括五个结构相同的手指结构,每个手指设有三个指节和三个关节,使手指具有三个“张开闭合”的自由度。其中拇指还通过手掌上的锥齿轮机构另外增加一个“摆动”自由度。手指的指节均由软体材料制成,关节均由刚性材料制成,指节和关节依次交替粘接形成刚软耦合结构。所有手指的根部固定于手掌上,手掌通过手掌连接底座与固定平台连接。五个手指通过腱绳驱动,所有驱动系统集成于灵巧手装置内部。本实用新型整个手指在非结构环境下能够避免与环境发生碰撞后而损坏,增强抓取的稳定性;有利于实现指尖捏取物体;采用模块化设计思想,五个手指与手掌完全独立,加工和装配更加简洁。