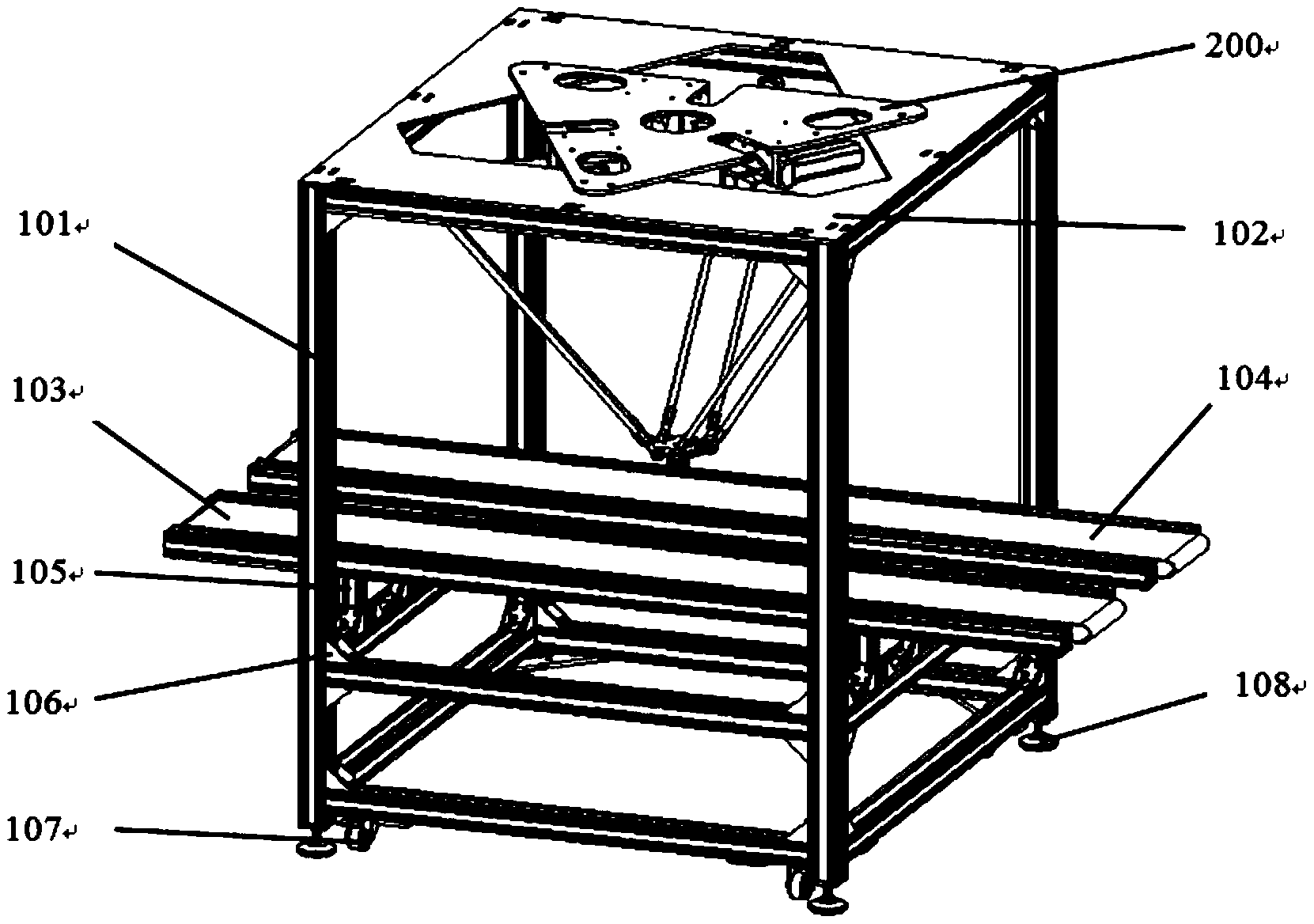
本实用新型属于机器人领域,涉及一种三轴快速分拣机器人系统,包括模块化框架、传送带组件、并联机器人和视觉系统;传送带组件穿过模块化框架的床身内部,位于并联机器人下方,通过支撑杆固定于模块化框架上;视觉系统螺接于并联机器人的静平台下端,用于采集传送带上待分拣物件的位置信息,提供给并联机器人,实现待分拣物件的精确分拣。本实用新型中并联机器人的三个支路均由两个连杆构成,呈现平行四边形状态,能够降低单杆的负载受力,提高系统有效分拣载荷,且运动连杆具有机械限位装置,保护连杆不被损坏。并联机器人能随时拆卸和安装。多分拣系统的串联组合,可大大提高分拣效率,模块化设计可快速实现生产线的组装与拆卸。