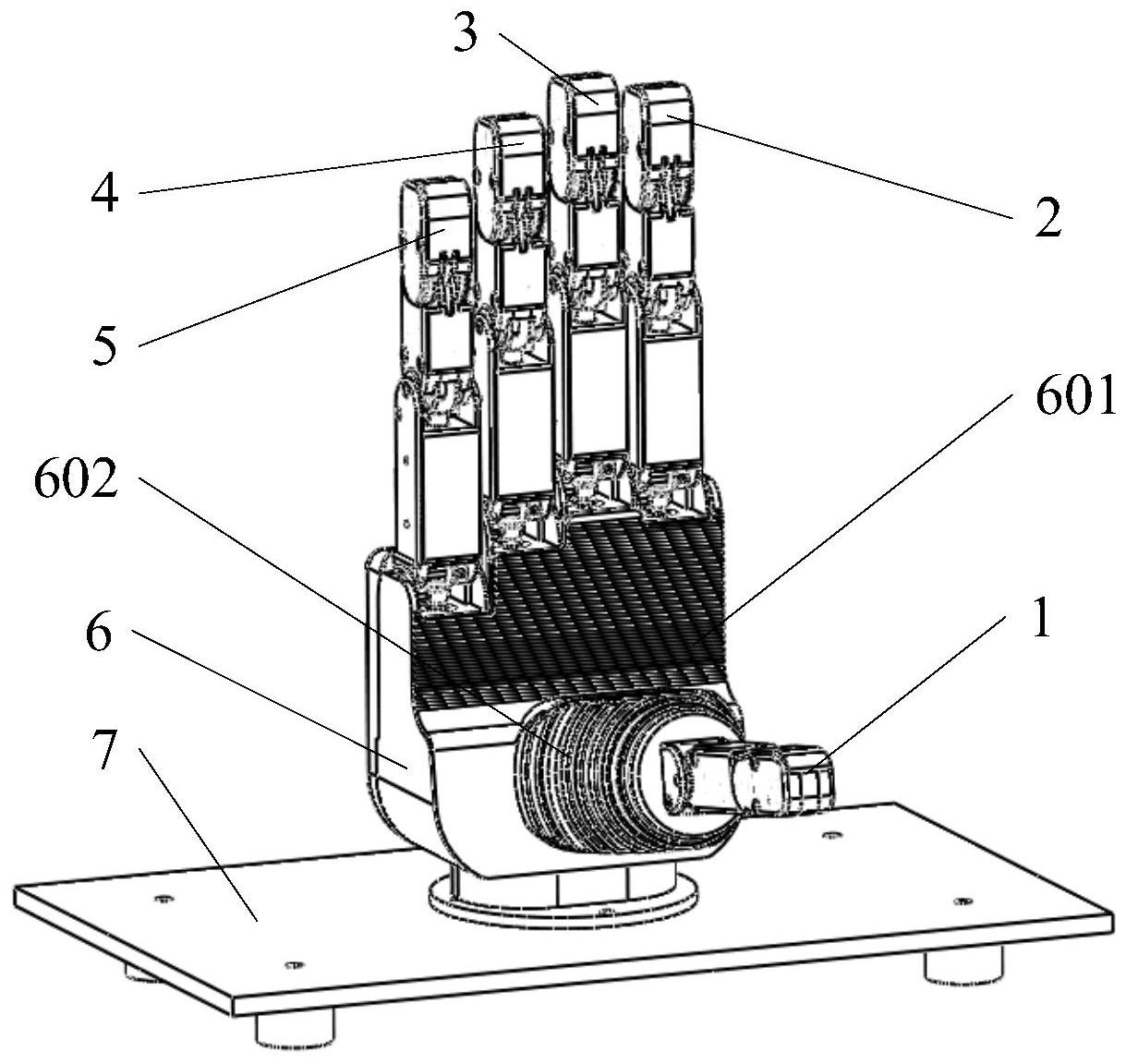
一种仿人五指灵巧手装置属于机器人领域,包括拇指、食指、中指、无名指、小指、手掌、固定装置、手掌盖,灵巧手的尺寸与成年人手相当,共15个自由度;拇指可与中指运动至同一抓取平面,与其它四指成一固定角度布置;五指的指节表面及手掌表面均安装触觉传感器;驱动系统、控制系统集成于灵巧手内部。本发明在不过多增加手指自由度的情况下,通过合理设计拇指结构、合理布置拇指位置,使灵巧手获得较高的抓取物体的能力;所涉及灵巧手指的欠驱动系统,其传动方式设计为“单电机‑双腱绳”机构,使灵巧手在物体抓取过程中实现良好的自适应性和柔顺性;本发明基于更加严格的模块化设计思想,四个手指结构相同,手指、拇指均与手掌完全独立,加工和装配更加简洁。