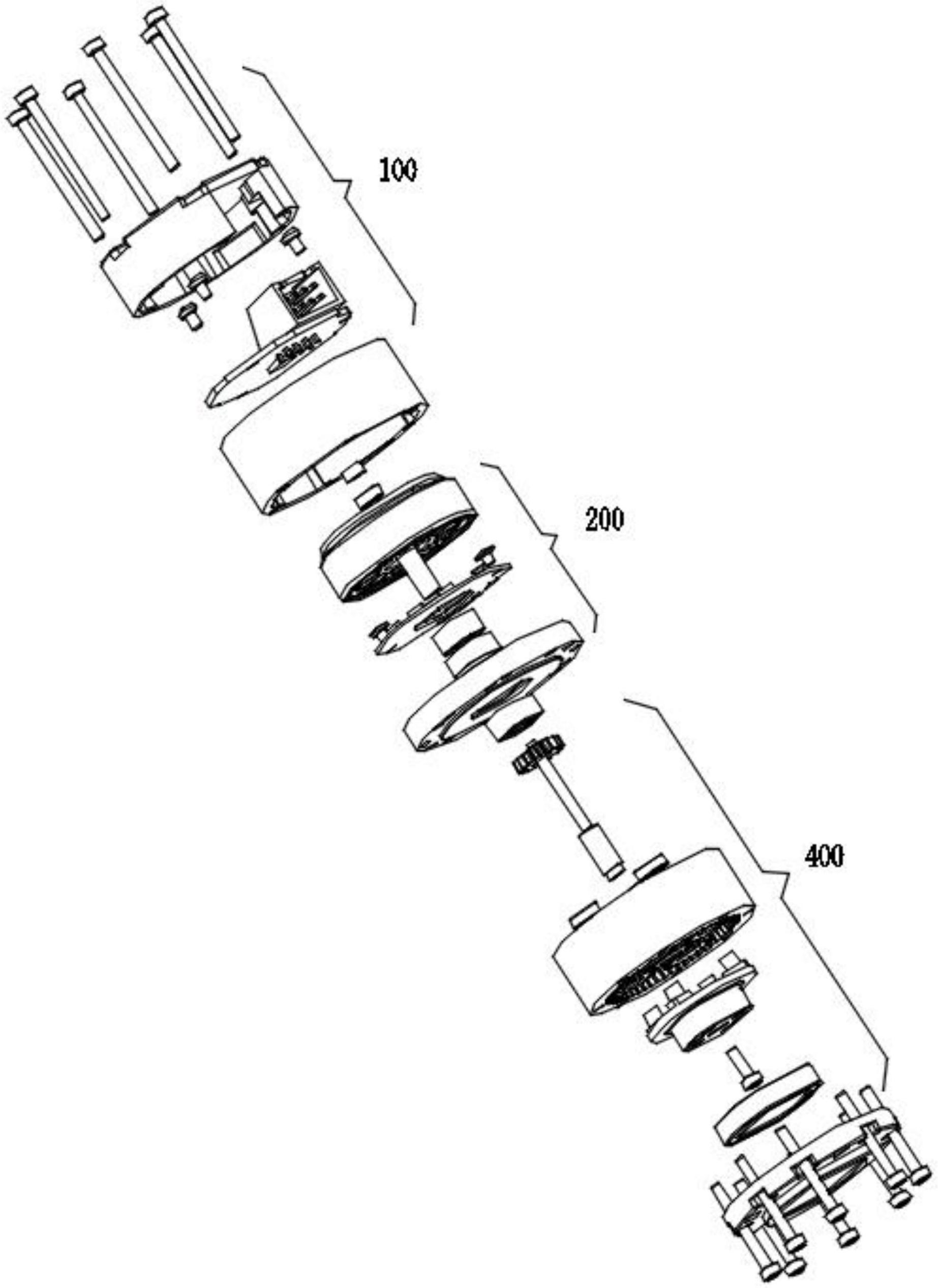
本实用新型属于舵机技术领域,尤其涉及一种舵机和机器人。本实用新型的舵机包括:电机;减速器,包括减速器输入端和减速器输出端,减速器输入端与电机的输出端传动连接;同步轴,与减速器输出端连接;控制模块,与电机电连接,控制模块用于控制所述电机转动;控制模块、电机和减速器沿舵机的轴向方向依次设置,所述控制模块还包括磁编码器,所述同步轴的一端延伸至电机的朝向所述控制模块的一侧,所述磁编码器包括磁性件和设置在控制模块上的磁场检测部件,所述磁场检测部件与控制模块电连接,所述磁性件设置在同步轴靠近所述控制模块的一端,并与所述同步轴连接。本实用新型的舵机和机器人无需复杂走线便可准确检测出舵机输出端的转动情况。