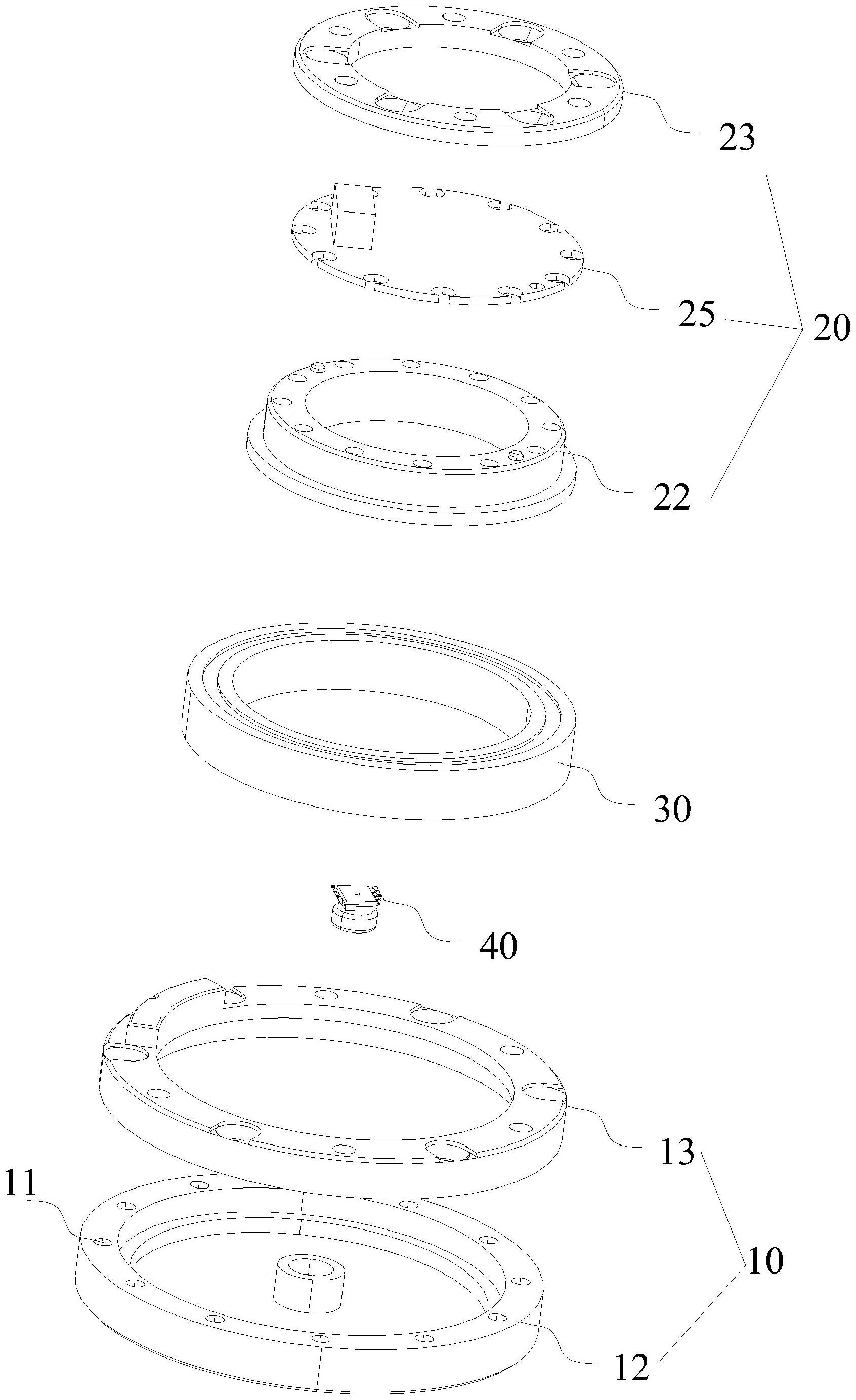
本实用新型属于机器人技术领域,尤其涉及一种转角检测关节模组和机器人控制器。本实用新型的转角检测关节模组,包括:第一组件,包括第一连接结构,所述第一组件通过第一连接结构与关节的第一部件连接;第二组件,包括第二连接结构,上第二组件通过第二连接结构与关节的第二部件连接;轴承,包括可绕预设轴线相对转动的内圈和外圈,所述外圈与所述第一组件连接,所述内圈与第二组件连接;磁编码器,包括磁盘和检测芯片,所述检测芯片上设置有用于检测磁场变化的检测元件,所述磁盘与第一组件连接,所述检测芯片与第二组件连接。本实用新型的关节模块可以准确获得关节转动角度。