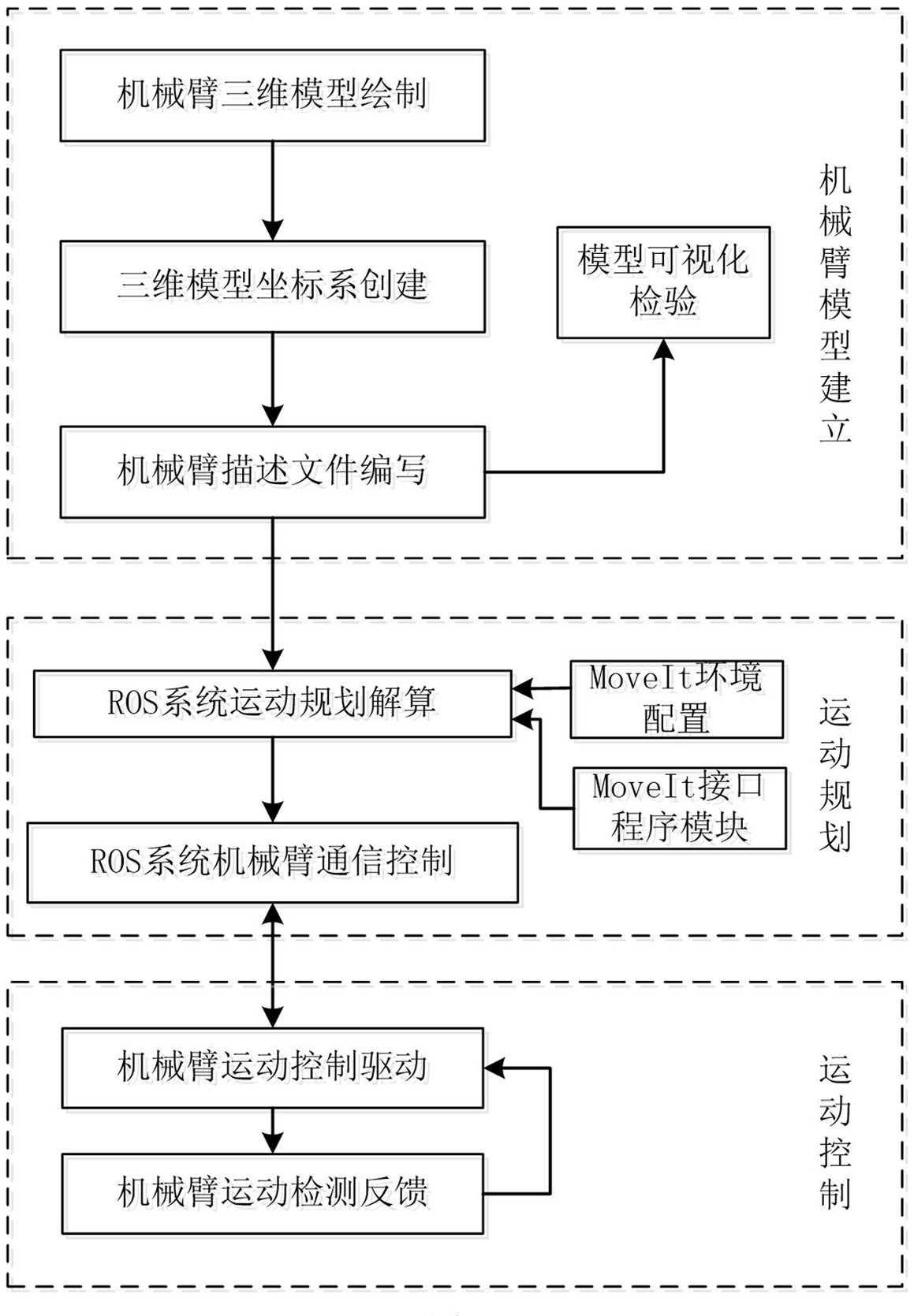
本发明提出一种基于ROS系统的机械臂建模及运动规划实现方法,主要包括以下步骤:1.机械臂各个零部件三维模型的绘制;2.机械臂各个零部件三维模型的坐标系的创建和保存;3.编写基于XML的机械臂描述文件;4.基于ROS系统的机械臂运动规划解算;5.系统通信及机械臂运动控制实现。本发明的方法可以快速建立机械臂的运动学模型和动力学模型,结合ROS系统的MoveIt模块调用相应的运动规划库实现机器人的运动规划,最后将运动规划解算的结果发送至机械臂的运动控制模块,从而实现机械臂的定位、抓取、空间跟随等动作。本发明的方法可以在ROS系统下对机械臂的运动规划进行快速开发和验证,既可以用于科研中的算法验证,也可以用于实际生产中的机械臂控制。