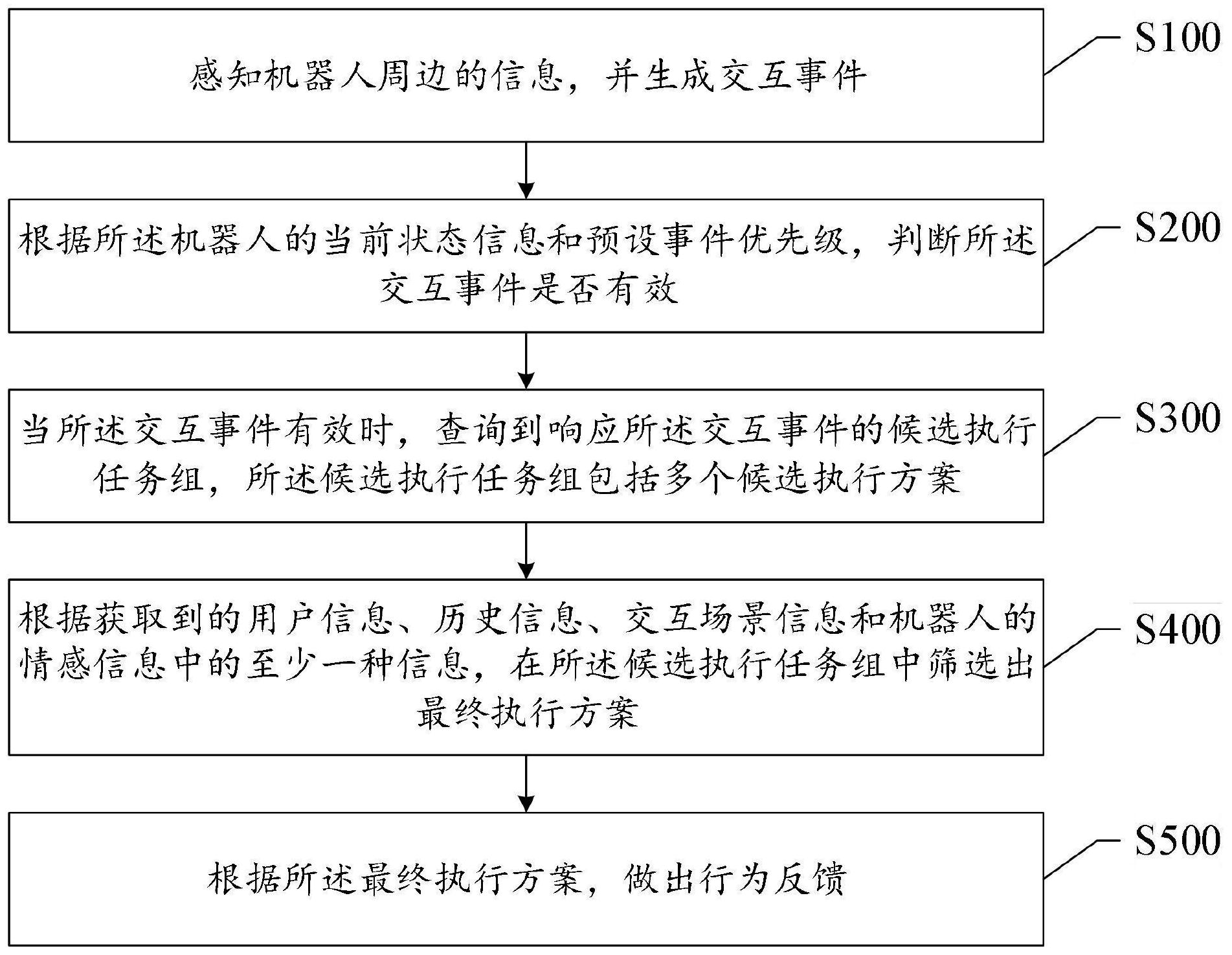
本发明公开了一种基于认知的机器人交互方法及系统,方法包括:感知机器人周边的信息,并生成交互事件;判断交互事件是否有效;当交互事件有效时,查询到响应交互事件的候选执行任务组;根据获取到的用户信息、历史信息、交互场景信息和机器人的情感信息中的至少一种信息,在候选执行任务组中筛选出最终执行方案;根据最终执行方案,做出行为反馈。本发明中,机器人获取交互事件后,通过自主认知判断交互事件是否有效,再结合用户信息、历史信息、交互场景信息和自身的情感信息,形成自己的认知,以从候选执行任务组中筛选出最终执行方案,使机器人拥有拟人化的交互能力,以与用户进行智能交互,提高用户的交互体验。