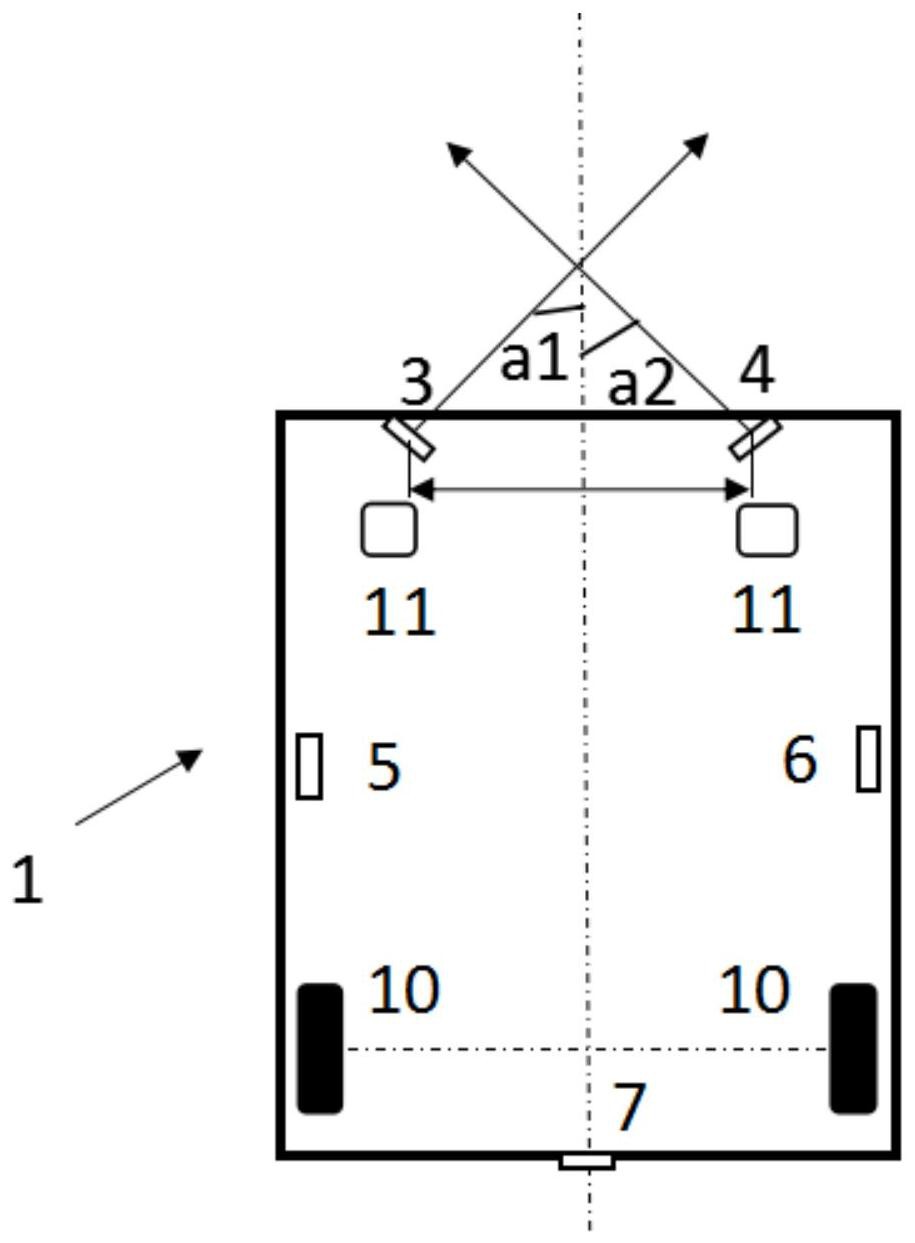
本发明提供了一种用于机器人的障碍物检测系统及方法,包括:底盘,底盘上设有两个辅助轮和两个主轮,主轮靠近底盘的第二端;底盘上还设有前左侧距离传感器、前右侧距离传感器、中左侧距离传感器、中右侧距离传感器和后中部距离传感器;其中,前两个传感器位于底盘的第一端,第一端与第二端相对;第三个传感器位于底盘的第三端,第四个传感器位于底盘的第四端,第三端与第四端相对,且第三端与第一端互相垂直;最后一个传感器位于底盘的第二端,其与第三个传感器的距离和其与第四个传感器的距离相同,其与第一个传感器的距离和其与第二个传感器的距离相同。本发明可以采用少量传感器,却可以完成全方位的障碍物扫描覆盖,降低了成本。