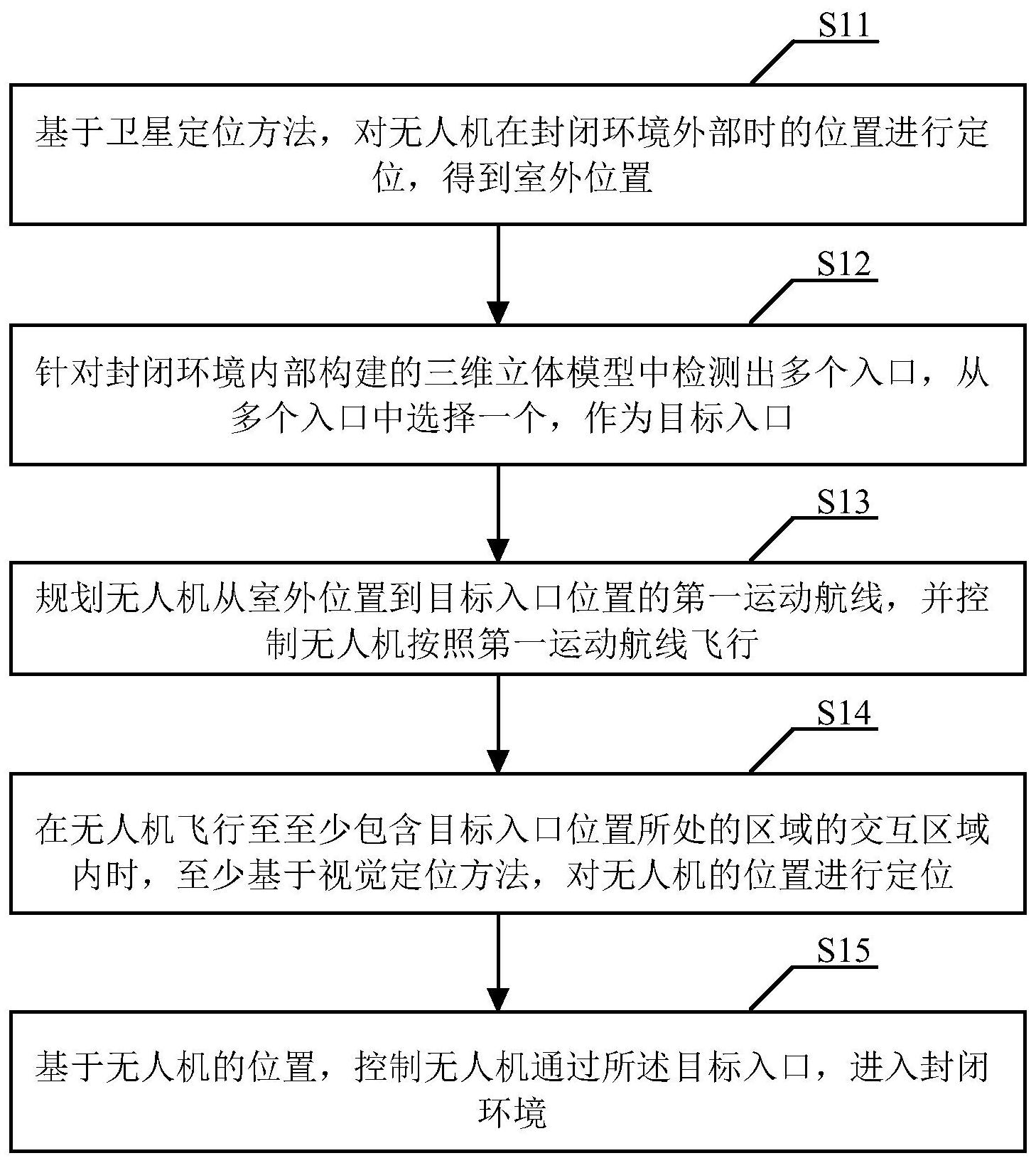
本申请提供了一种无人机进入封闭环境的控制方法及装置,该方法对无人机在封闭环境外部时的位置进行定位,得到室外位置,并从三维立体模型中检测出多个入口位置,从多个入口位置中选择一个,作为目标入口位置,规划无人机从室外位置到目标入口位置的第一运动航线,并控制无人机按照第一运动航线飞行,实现引导无人机从封闭环境外部向封闭环境内部运动,在无人机飞行至交互区域内时,至少基于视觉定位方法,对无人机的位置进行定位,实现从定位方式切换,保证无人机在封闭环境内的准确定位,在此基础上,基于无人机的位置,控制无人机通过目标入口位置对应的目标入口,进入封闭环境,实现无人机准确的进入封闭环境。