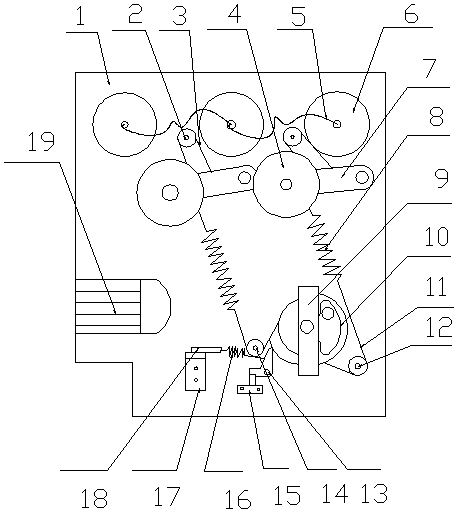
本实用新型的一种新型的减震机器人行走装置,包括主板、上压紧轮和下压紧轮,所述下压紧轮右侧设置有悬挂臂且两者中间设有定滑轮,所述定滑轮上设有转动皮带,所述上压紧轮中心设有连接转动带穿过平行的三个上压紧轮带动连接旋转,所述下压紧轮的下方设有第一拉簧,所述第一拉簧下方设有棘轮和钢丝绳,所述钢丝绳底部设有固定连接的大定滑轮,所述棘轮的左侧设有把手,所述主板的左侧设有电机,所述把手的左侧依次设有棘爪、小定滑轮和第二拉簧,所述棘爪的尾端设有弹簧座固定焊接在棘爪上,所述小定滑轮穿过第二拉簧固定连接设有旋转板和连接板;设置了连接转动轴固定的将上压紧轮连接旋转,增加了摩擦力,拉簧起到一定减震效果,使用方便。