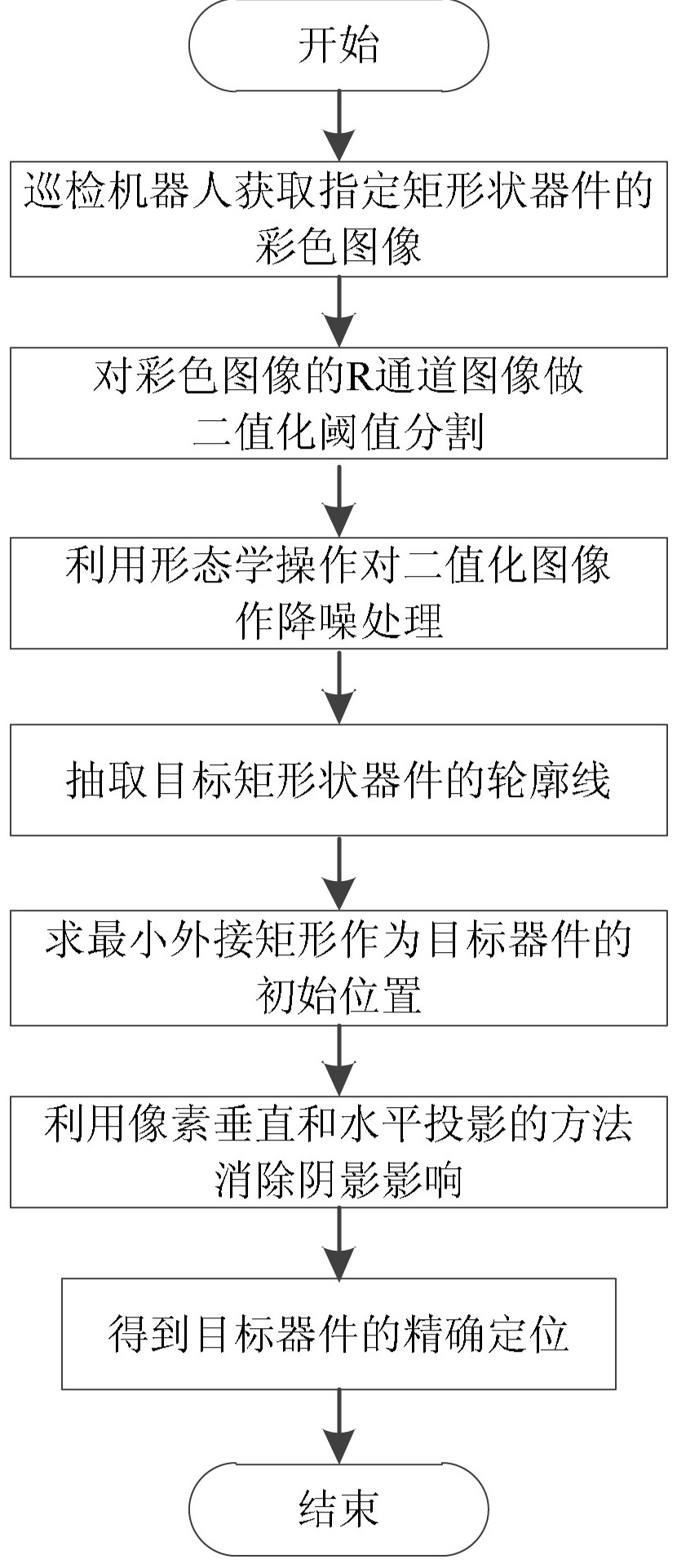
本发明涉及一种有阴影光照下矩形状电器件的定位方法。主要解决利用基于图像点特征的配准法在多种仪表仪器自动定位识别过程中有阴影存在下效果不理想的技术问题。本发明首先由巡检机器人获取到仅包含指定矩形状器件的彩色图像,对该彩色图像的R通道图像分别进行阈值分割和形态学操作得到去除噪声后的二值图像;然后在该二值图像中抽出面积最大区域的轮廓线,通过设定面积阈值来判断该区域是否为目标器件,并利用目标矩形状器件所在区域的轮廓线来求得最小外接矩形;最后借助像素垂直和水平投影法消除阴影影响,从而得到图像中的矩形状电器件的精确位置。本发明通过上述方法能够实现在有阴影光照下矩形状电器件的高精度定位。