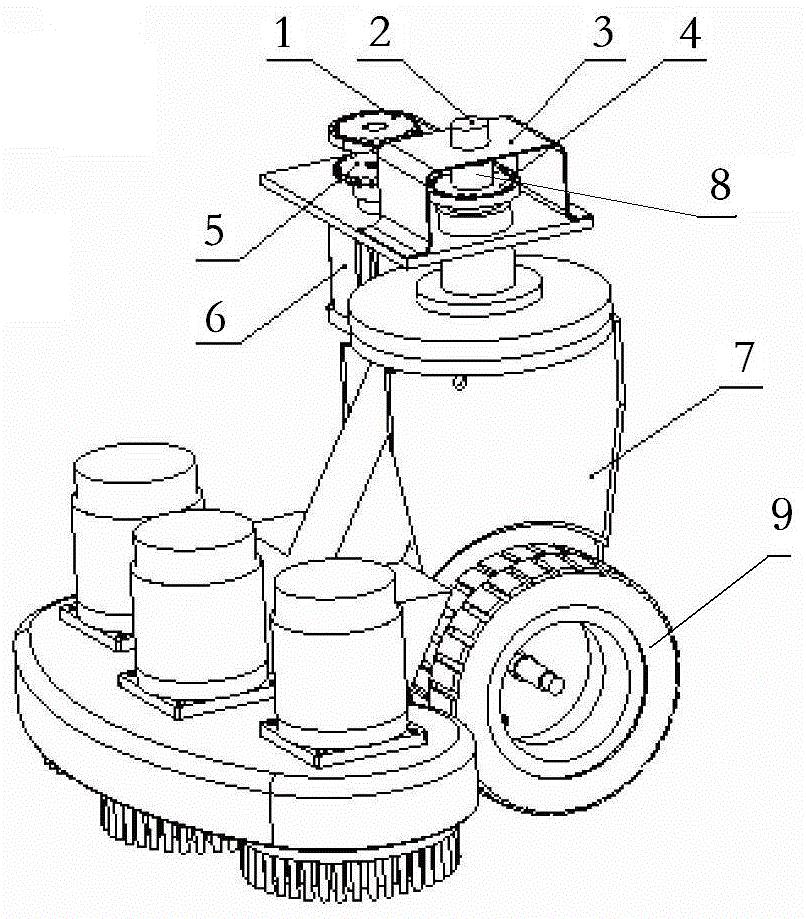
本实用新型涉及一种用于自主机器人的转向反馈机构,主要解决现有的一些轮式机器人的转弯系统为开环控制,无法实现机器人在自主导航系统下自主运动时的转弯运动。本实用新型的技术方案为:一种用于自主机器人的转向反馈机构,由驱动链轮、编码器、编码器支撑板、从动链轮、张紧链轮、驱动电机、转向轮组件、编码器连接轴组成,从动链轮安装在转向轮组件上,编码器通过编码器支撑板、编码器连接轴连接转向轮组件,实现转向轮的转向相对角度与编码器的转向角度同步。驱动链轮设置在从动链轮一侧,并通过链条传动,张紧链轮设置在驱动链轮和从动链轮之间与链条啮合,驱动链轮下方同轴连接驱动电机,驱动电机通过驱动链轮、张紧链轮、从动链轮驱动转向轮组件。