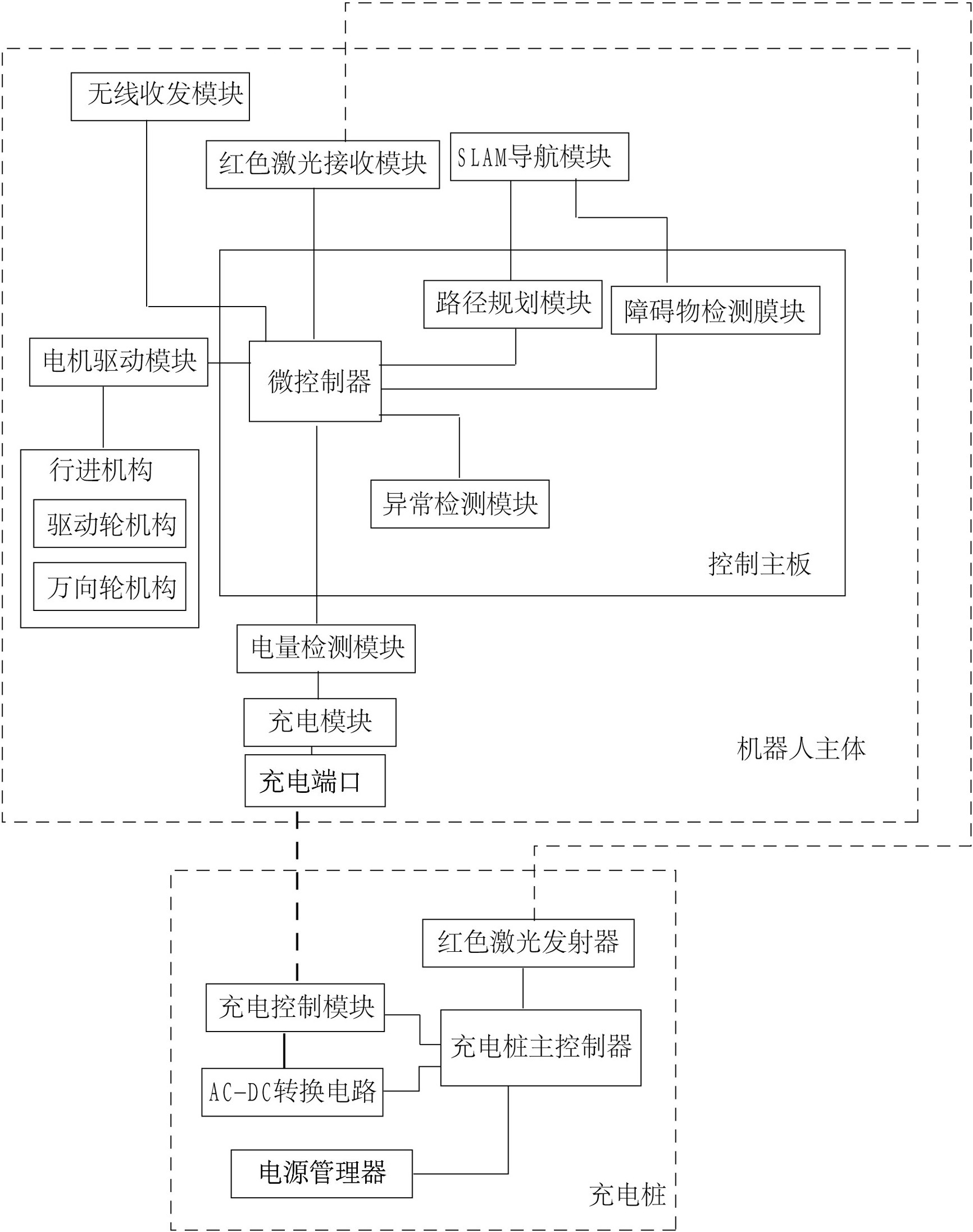
本实用新型为一种机器人自主充电系统。它包括机器人主体、充电桩,所述机器人主体包括控制主板、电机驱动模块、行进机构、电量检测模块、充电模块、SLAM导航模块、红色激光接收模块、无线收发模块,所述控制主板包括微控制器、障碍物检测模块、路径规划模块;所述控制主板的微控制器分别与所述电机驱动模块、电量检测模块、障碍物检测模块、路径规划模块、红色激光接收模块、无线收发模块相连;所述行进机构与所述电机驱动模块相连,所述充电模块与所述电量检测模块相连,所述SLAM导航模块分别与所述障碍物检测模块、路径规划模块相连。本实用新型机器人自主充电系统具有定位精度高、受震动影响小、结构简单、安全系数高的优点。