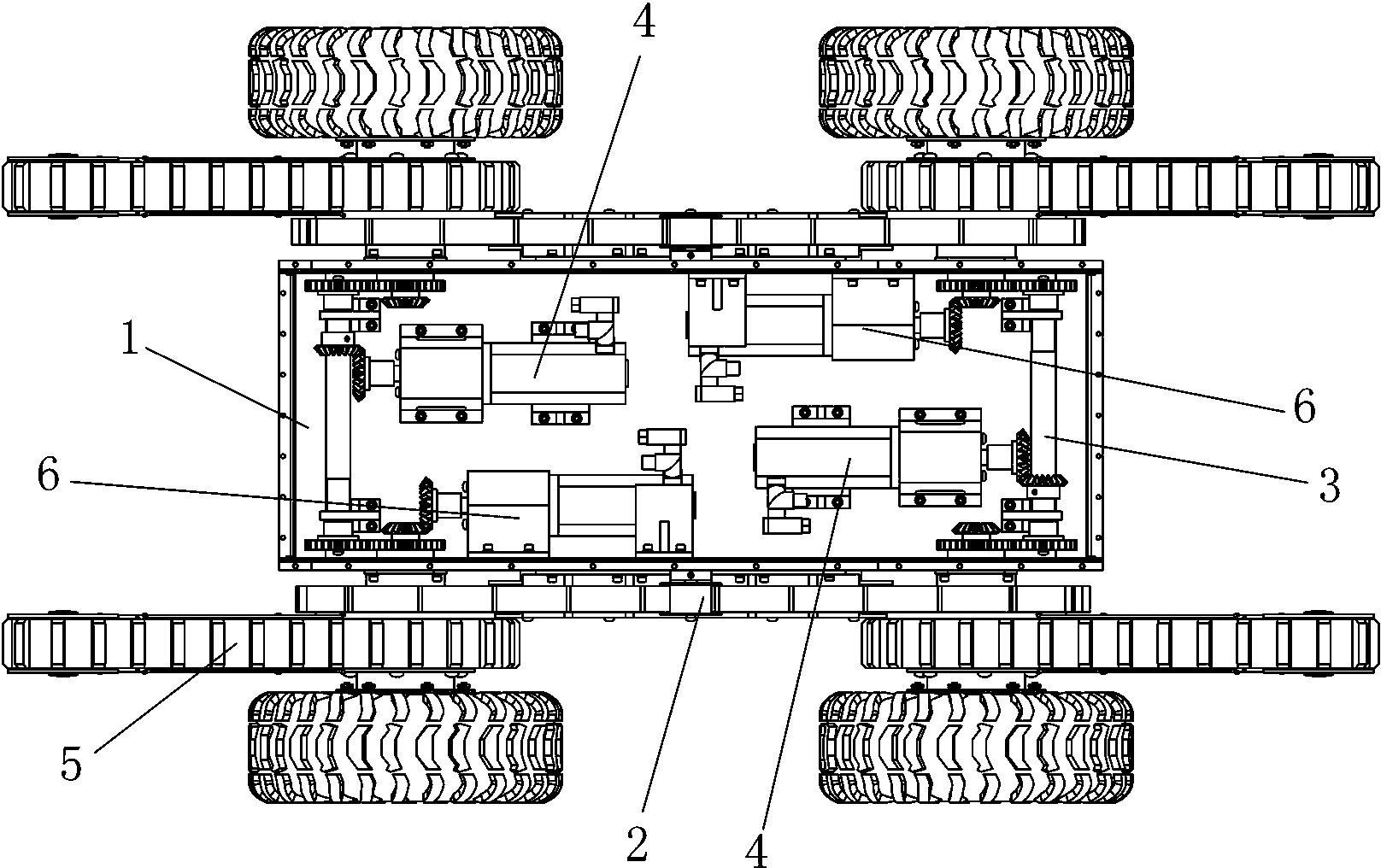
本发明为一种适用于轮履复合式底盘的翻转臂机构,包括底舱、侧板行进组件、2个行驶驱动电机、2个翻转臂同步连接组件、2个翻转臂驱动电机组件、4个翻转臂组件;所述2个翻转臂驱动电机组件分别固定在底舱上,所述翻转臂驱动电机组件与翻转臂同步连接组件一对一相连,所述每1个翻转臂同步连接组件与2个翻转臂组件相连,所述翻转臂组件与所述侧板行进组件的车轮组件一对一相套连,其中所述翻转臂组件套接在所述车轮驱动轴上;所述翻转臂驱动电机组件通过所述翻转臂同步连接组件驱动所述翻转臂组件在所述车轮组件上旋转或摆动。本发明体积小、易于控制、功能多样,可广泛应用于地面移动机器人、履带式车辆、轮履复合式机器人等的行驶系统。