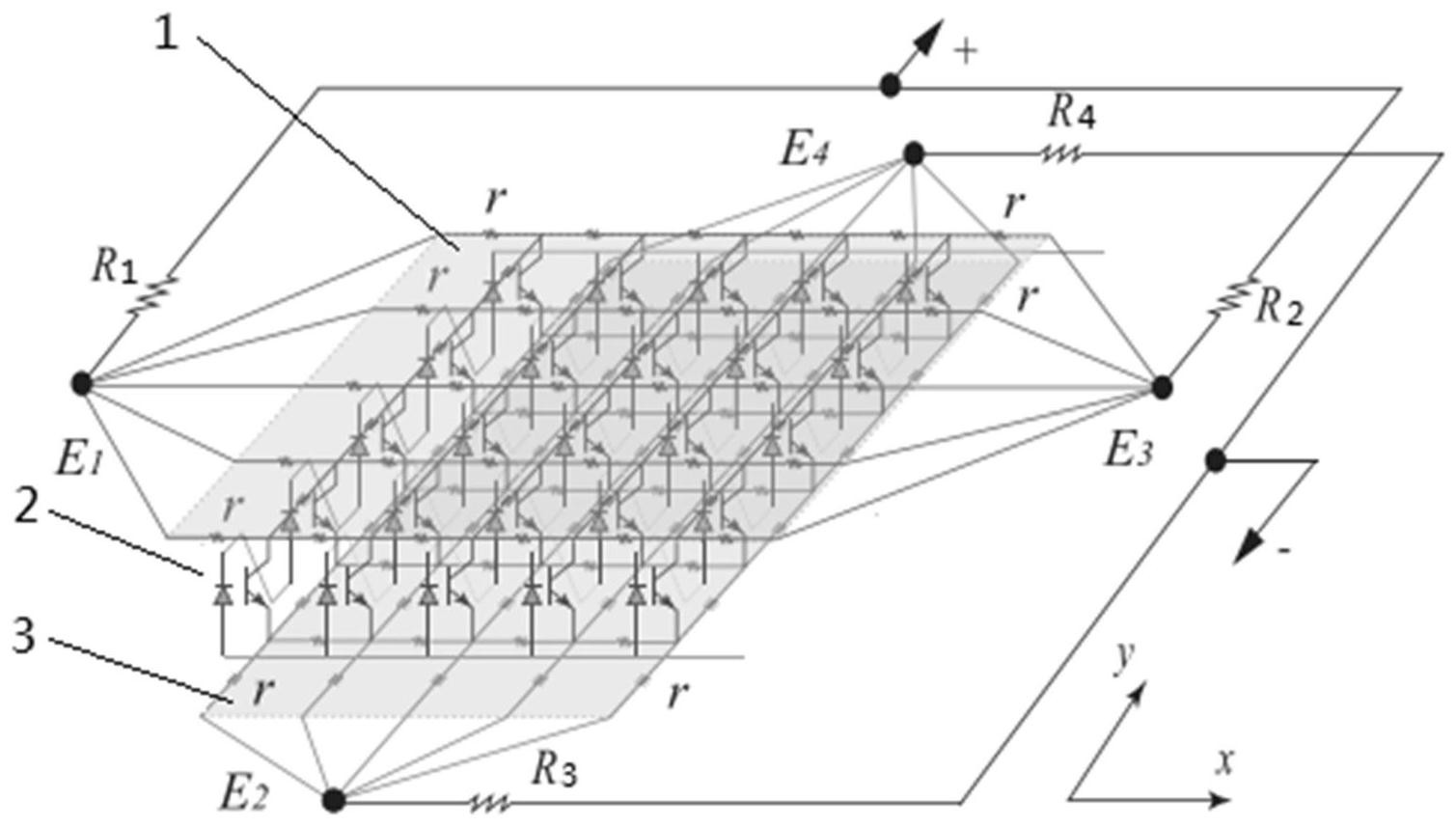
本发明公开了一种红外阵列接近传感器,包括顶阵列电路、红外发生层以及底阵列电路;顶阵列电路与底阵列电路相对设置,且顶阵列电路通过红外发生层与底阵列电路连接;通过顶阵列电路的第一电阻网络的输出端、红外发生层以及底阵列电路的第二电阻网络的输入端串联,在红外发生层接收到反馈信息时,第一电阻网络的第一输入端和第二输入端、第二电阻网络的第一输出端和第二输出端同时输出待检测物体相对于顶阵列电路的位置信息。本发明结构简单,直接输出待检测物体相对于顶阵列电路的位置信息,其为模拟量信号,不仅简化后续处理器复杂的运算;而且可直接安装于机器人表面来减小大量的盲区,避免发生碰撞。