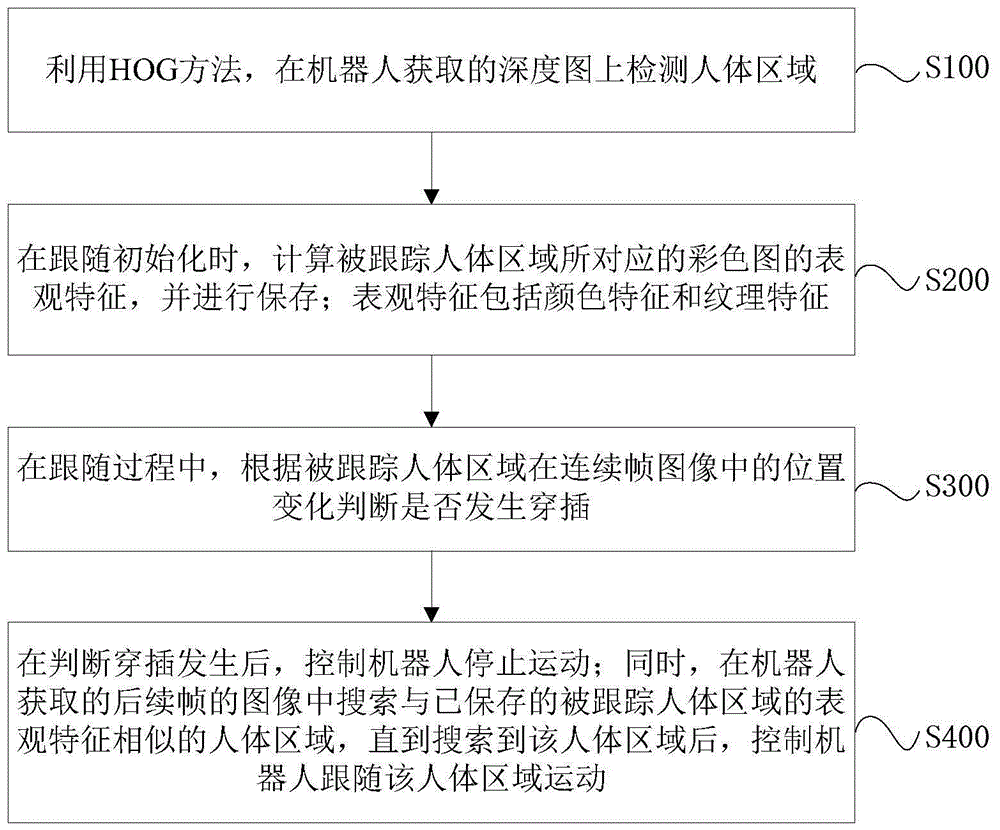
本发明公开了一种机器人跟随人体的方法及系统,其中方法包括:利用HOG方法,在机器人获取的深度图上检测人体区域;在跟随初始化时,计算被跟踪人体区域所对应的彩色图的表观特征,并进行保存;所述表观特征包括颜色特征和纹理特征;在跟随过程中,根据被跟踪人体区域在连续帧图像中的位置变化判断是否发生穿插;在判断穿插发生后,控制机器人停止运动;同时,在机器人获取的后续帧的图像中搜索与已保存的被跟踪人体区域的表观特征相似的人体区域,直到搜索到该人体区域后,控制机器人跟随该人体区域运动。本发明大大减少了人体区域的误检,能够更加准确地表征被跟踪人体的表观特征,防止跟丢,在穿插发生后可靠的实现持续跟随。