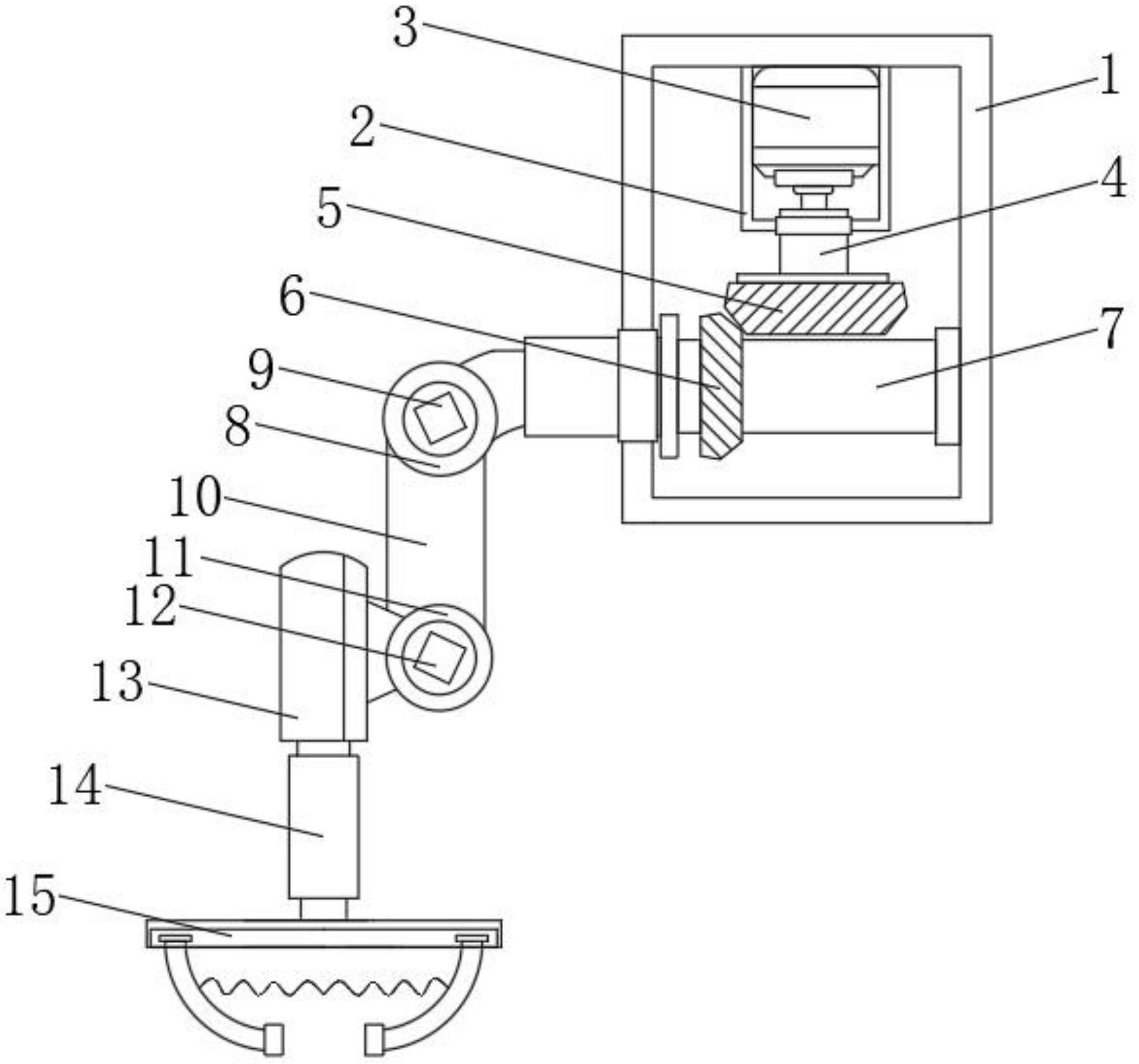
本实用新型公开了一种多介数字印刷机的机器人手臂,包括控制箱,所述控制箱内壁的顶部固定连接有电机箱,所述电机箱内壁的顶部固定连接有电机,所述电机的输出轴固定连接有转杆,所述转杆的底端固定连接有第一锥形齿轮,所述第一锥形齿轮的底部啮合有第二锥形齿轮,所述第二锥形齿轮的轴心处固定连接有圆杆,所述圆杆的一端贯穿控制箱并延伸至控制箱的外部。本实用新型所述的一种多介数字印刷机的机器人手臂,设有弧型杆与电机,能够为机器人在印刷领域的广泛的深入研究提供了平台,还可以保证多介质数字印刷机机器人手臂在不同抓姿中保持在同一位置高度的水平面内运动,便于印刷时的套印的准确性,带来更好的使用前景。