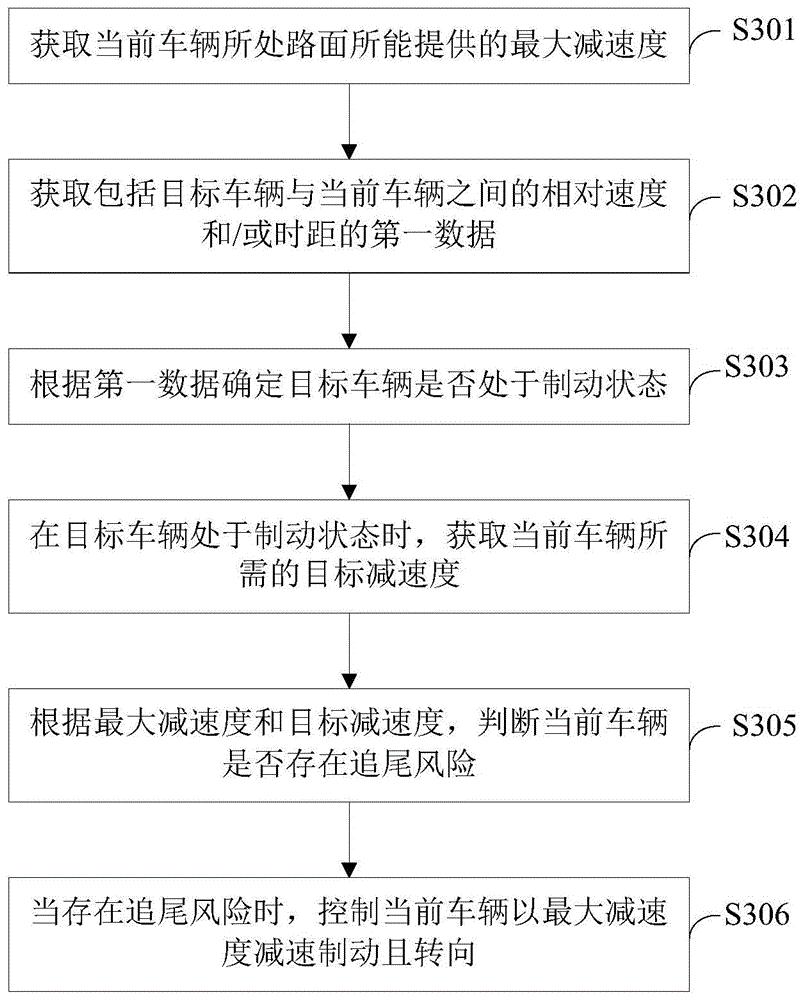
本发明提出一种车辆控制方法及系统,其中,方法包括:获取当前车辆所处路面所能提供的最大减速度;获取包括目标车辆与当前车辆之间的相对速度和/或时距的第一数据;其中,目标车辆为位于当前车辆的前方且距离当前车辆最近的车辆;根据第一数据确定目标车辆是否处于制动状态;在目标车辆处于制动状态时,获取当前车辆所需的目标减速度;根据最大减速度和目标减速度,判断当前车辆是否存在追尾风险;当存在追尾风险时,控制当前车辆以最大减速度减速制动且转向。该方法将当前车辆所处路面所能提供的最大减速度和所需的目标减速度作为判断是否存在追尾风险的一个依据,解决了现有ACC控制过程中未考虑路面附着条件,导致控制效果差、安全性低的问题。