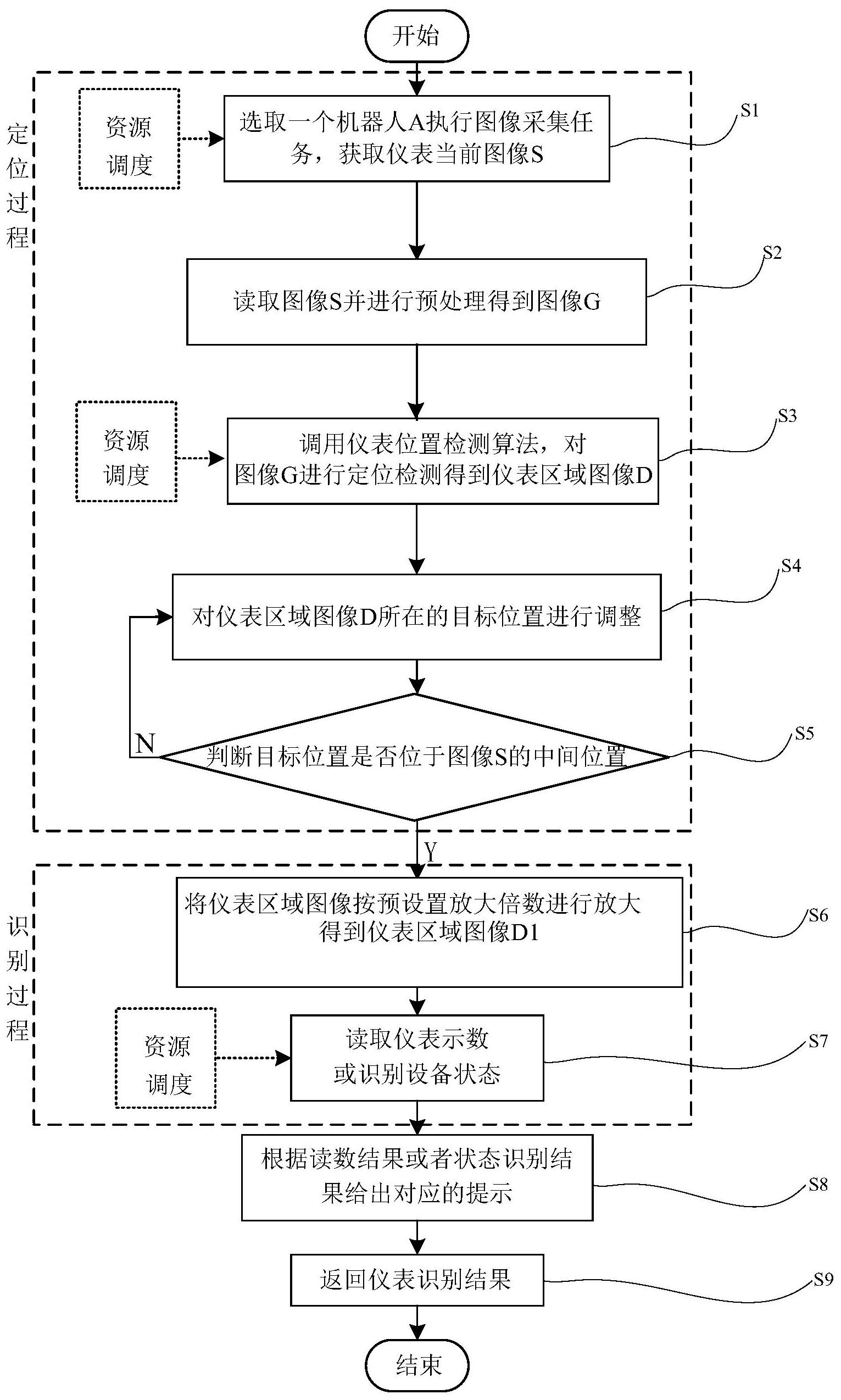
本发明属于智能图像处理技术领域,涉及一种机器人集群图像识别的分布式处理方法及系统,所述方法包括:获取仪表当前图像S;读取图像S并进行预处理得到图像G;调用仪表位置检测算法,对图像G进行定位检测得到仪表区域图像D;对仪表区域图像D所在的目标位置进行调整;判断目标位置是否位于图像S的中间位置;将调整后得到的区域图像按照放大倍数进行放大,得到仪表区域图像D1;读取仪表当前示值或识别当前设备的开关状态;根据读数结果或者状态识别结果给出对应的指示;返回仪表识别结果,识别结束。这种方法,可应用于智能防爆巡检机器人来代替人工进行巡检,使用分布式部署的方式,合理利用系统资源,提高巡检系统的工作效率。