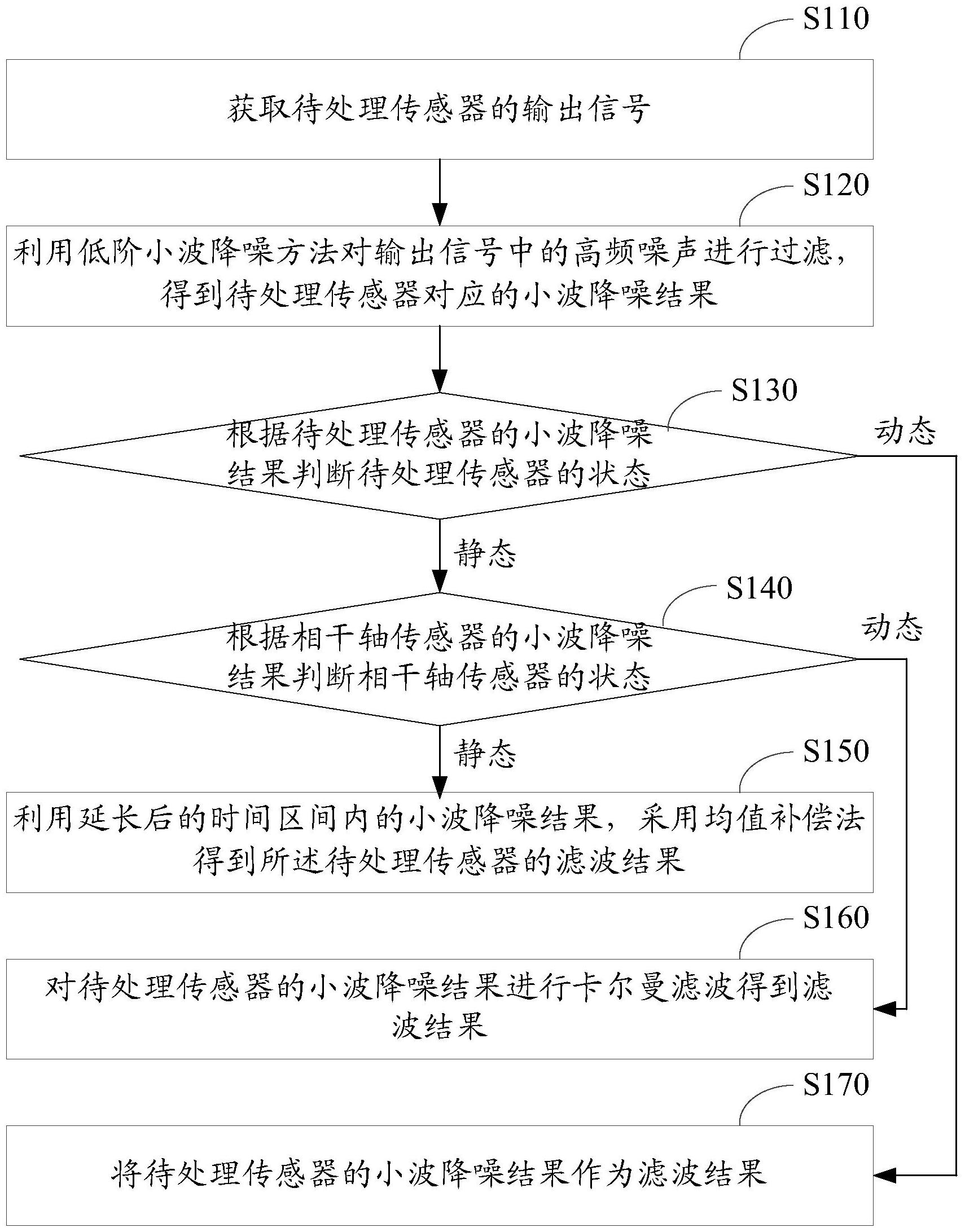
本发明提供的IMU的滤波方法及装置,对待处理传感器的输出信号首先进行低阶小波降噪处理;然后,检测传感器的状态,当待处理传感器及相干轴传感器均处于静态时,采用均值补偿法过滤小波降噪结果中的低频噪声;当待处理传感器处于静态、且相干轴传感器处于动态时,对小波降噪结果进行卡尔曼滤波,从而对小波降噪结果中的低频噪声起到抑制作用。采用了低阶小波降噪方法,因此运算量小;而且,通过均值补偿法消除低频噪声对静态下的传感器的影响,提高了滤波方法的静态性能;通过卡尔曼滤波方法,抑制待处理传感器静态、相干轴传感器动态下的低频噪声,提高了IMU的滤波的动态性能。