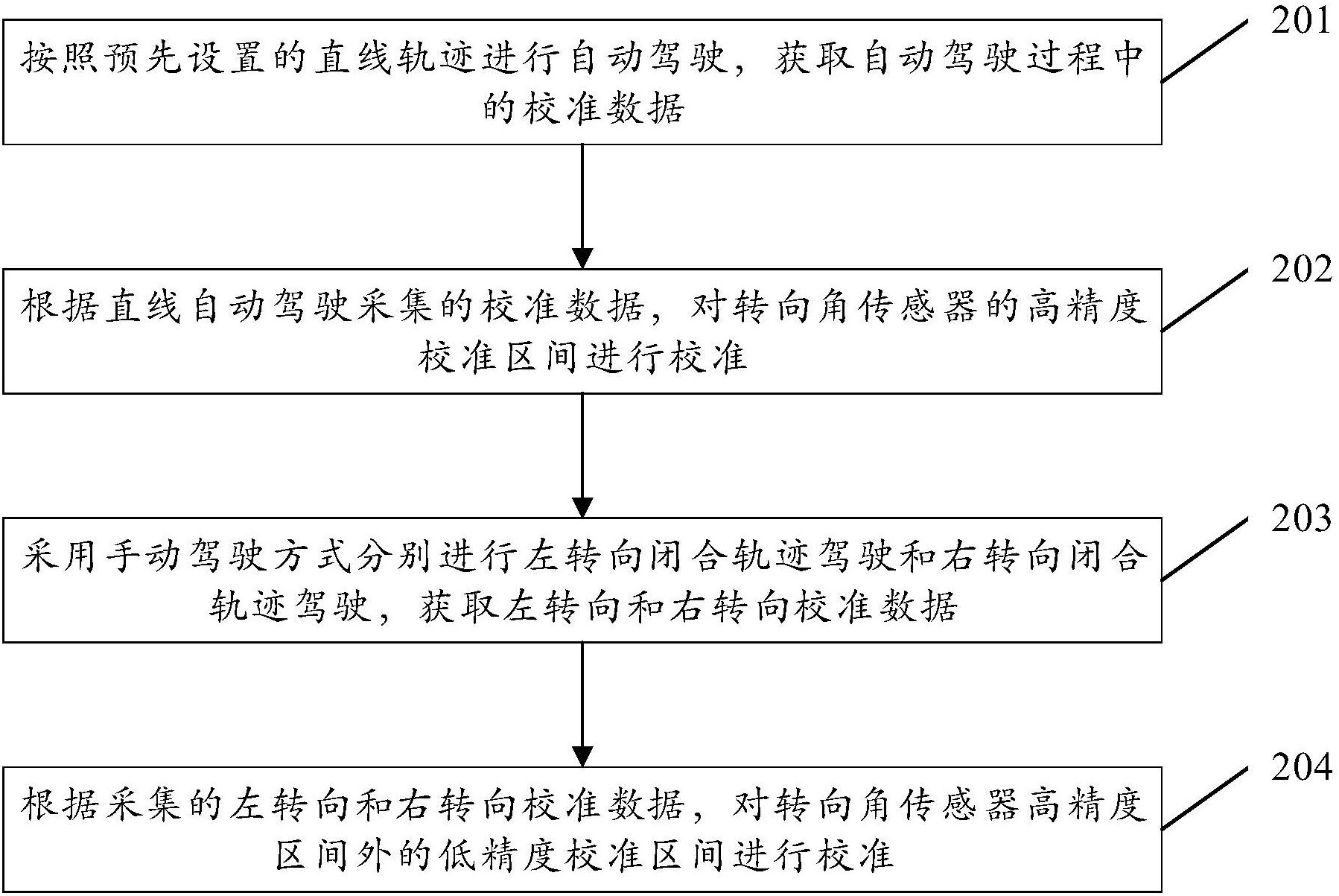
本发明公开一种转向角传感器的校准方法和装置,涉及信息处理技术,以解决现有技术对转向角传感器进行校准的操作复杂、校准时间长的问题。包括:按照预先设置的直线轨迹进行自动驾驶,获取自动驾驶过程中的校准数据;根据直线自动驾驶采集的校准数据,对转向角传感器的高精度校准区间进行校准;采用手动驾驶方式分别进行左转向闭合轨迹驾驶和右转向闭合轨迹驾驶,获取左转向校准数据和右转向校准数据;根据左转向校准数据和右转向校准数据,对转向角传感器高精度校准区间以外的低精度校准区间进行校准。本发明提供的技术方案可以应用在农机自动驾驶装置上。